84 Rockwell Automation Publication 750-RM100A-EN-P - August 2019
Chapter 9 Reference Motion Planners
Step 2—Configure Move Target Velocity
Adjust parameters described in the following table to define your move target velocity.
You can enter a constant set point or select an input signal. Note that as an input signal
changes, the Velocity Reference motion planner acts as a filter with a combined cam-on-
cam effect.
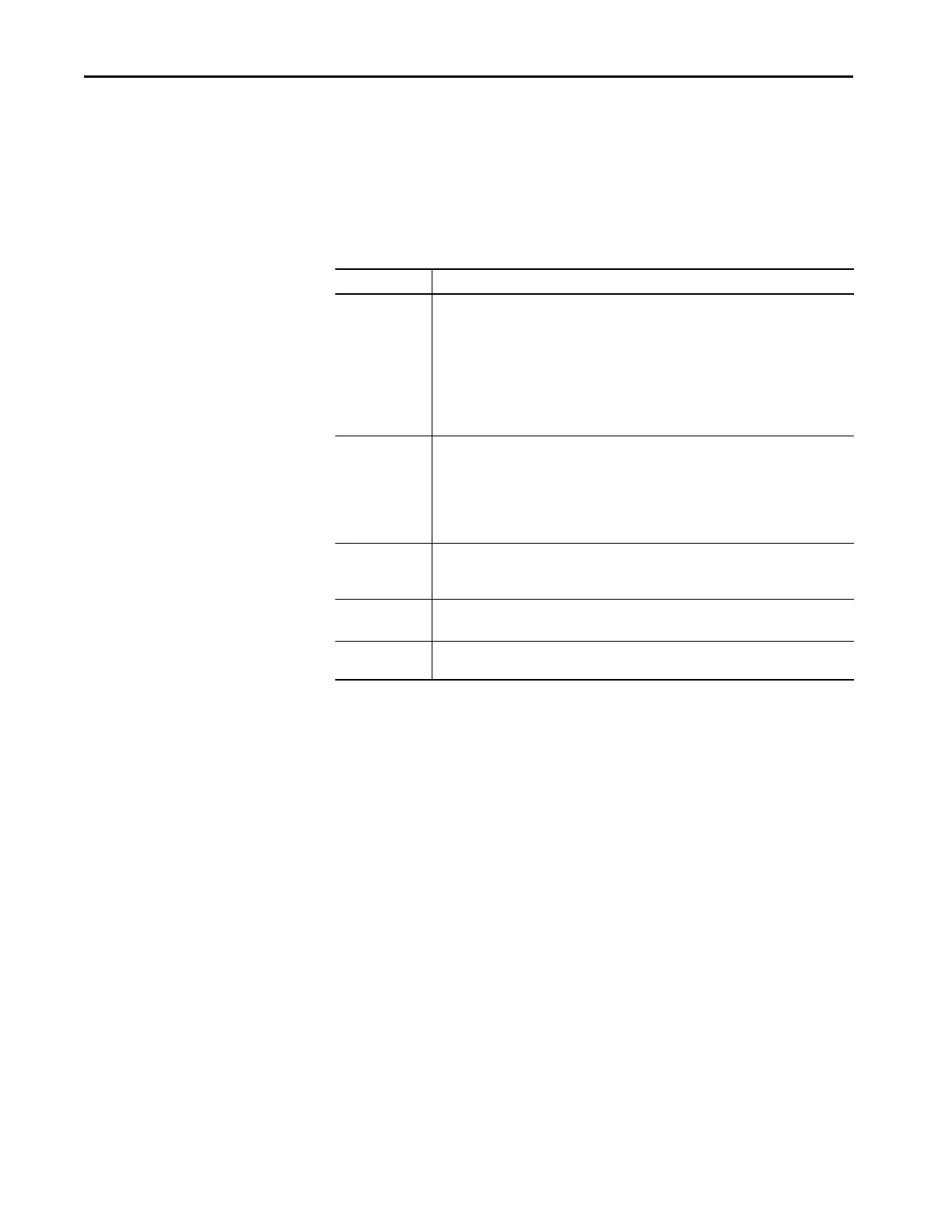
Table 30 - Velocity Reference Distance Parameters
Parameter Description
10/11:354
[Motor Side Sts 1]
Displays the operating condition of the Motor Side Inverter:
Bit 9 ‘Manual’ indicates the Auto/Manual function is in the Manual mode.
Bit 10 ‘SpdRef Bit 0’ indicates the state of the Speed (Velocity) reference selection bit 0.
Bit 11 ‘SpdRef Bit 1’ indicates the state of the Speed (Velocity) reference selection bit 1.
Bit 12 ‘SpdRef Bit 2’ indicates the state of the Speed (Velocity) reference selection bit 2.
Bit 13 ‘SpdRef Bit 3’ indicates the state of the Speed (Velocity) reference selection bit 3.
Bit 14 ‘SpdRef Bit 4’ indicates the state of the Speed (Velocity) reference selection bit 4. These
bits work together to select a velocity reference.
10/11:1800
[VRef A Sel]
Select a source for Velocity Reference A.
Select the port and parameter of the source.
This is the typical Automatic reference.
Digital input functions for and bits in the Logic Command select between Velocity Reference A
and Velocity Reference B.
A Manual selection will override this.
10/11:1801
[VRef A Stpt]
Enter a constant value to be used as a source for Velocity Reference A.
You can select this constant as a reference in 10/11:1800 [VRef A Sel]. This is similar to using a
Preset.
10/11:1804
[VRef A Mult]
Enter a value to define a multiplier for Velocity Reference A.
The value from the source selected by 10/11:1800 [VRef A Sel] will be multiplied by this.
10/11:1914
[VRef Commanded]
Displays the value of the Velocity Reference after the Skip Speed function.

 Loading...
Loading...











