Rockwell Automation Publication 750-PM101B-EN-P - April 2022 47
Chapter 3 PowerFlex 755T Control Block Diagrams
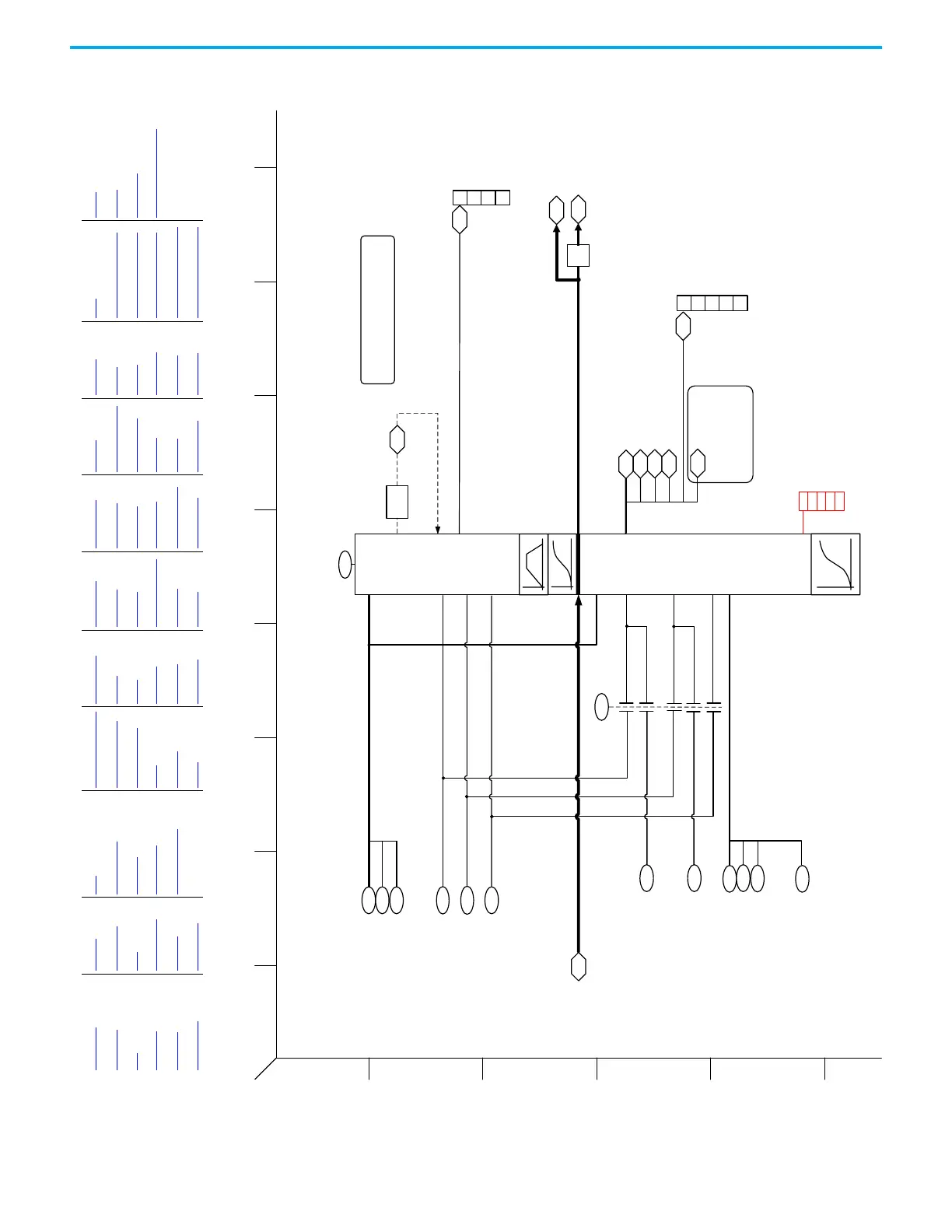
Figure 26 - Position Reference – Move Profiles
PTP S Curve
PTP Accel Time
LinScurve
(0)
1403
1
2
3
4
5
6
BA
D
C
FHEG
I
PTP Decel Time
PTP Position Reference – Move Proles (PRef Move)
1398
1399
PRef 1 [E2]
PRef 1 [G2]
SineSquared
(1)
Poly5
(2)
Cubic
(3)
0 = Rate
0 = Rate
0 = Rate
933
Ref Time Base
934
Ref Accel Time
1 = Time
935
Ref Decel Time
1 = Time
932
RefEnergyBalance
936
Ref Max Accel
937
Ref Max Decel
941
Ref Fault Cong
Ref Move Type
931
1406
PTP Vel Max
1407
1408
1409
1410
1411
PTP Accel Max
PTP Decel Max
PTP Move Time
PTP Move Status
PTP Move Seg
24
PTP VelMax Time
25
PTP AccMaxTime
26
PTP DecMaxTime
27
PTP Time Left
0
AccelLimited
DecelLimited
1
2
Vel Limited
Zero Move
3
4
Move Failed
0- Accel Decel
1- Dwell Decel
2- Decel
3- Reversing
1391
PTP
Command
1404
1405
PTP VRef Fwd
PTP Reference
1392
Max Speed Fwd
1393
Max Speed Rev
1402
PTP Vel Override
1396
Virtual
Encoder
PTP Feedback
0
PTP PRef Status
1
ZeroFFSpdRef
PTP Int Hold
2
SpdFFRef En
3
Ref Complete
1380
PTP Reference [1404], PTP Feedback
[1396], PTP Command [1391] are
loaded with Position Actual [1745].
Point to Point parameter initializations
performed with Position Regulator
INACTIVE
These parameters apply to all Move Types
28
PTP Iterations
6
Overview VarCtrl PFC Vector Overview PRef Move Prof Ind 2 VelRefCAM Ld Obs Cur IPM MOP Logic
Metering DroopCtrl CurPwrLmt Freq Overview PRef2 Roll Psn VRef Vect Friction Comp Proc 1 22Series IO Digital Invert
PLL DBC CurrCtrl CBI Metering PReg Spindle Ref Move Trq RefCAM Proc 2 22Series IO Digital Motor I2T
PwrLoss VoltRefGen LscCtrlCfg Fdbk Psn PLL VRef Overview VReg Vect Trq Ref AntiSway 11-Series IO Digital High Speed Wizard
LscData VoltCtrl DriveDerating Homing Psn CAM VRef Sel Trq Overview Trq Filt Oil Well 1 22-Series IO Analog
CurRefGen DCBusObs PRef1 Prof Ind 1 VRef All Trq Ref Sel Cur IM SPM Oil Well 2 22-Series IO Analog PRef Move

 Loading...
Loading...







