5 COMMISSIONING AND OPERATION
32 Operating Instructions | InspectorP Rack Fine Positioning 8024534 / 16UW / 2020-02-26
Subject to change without notice
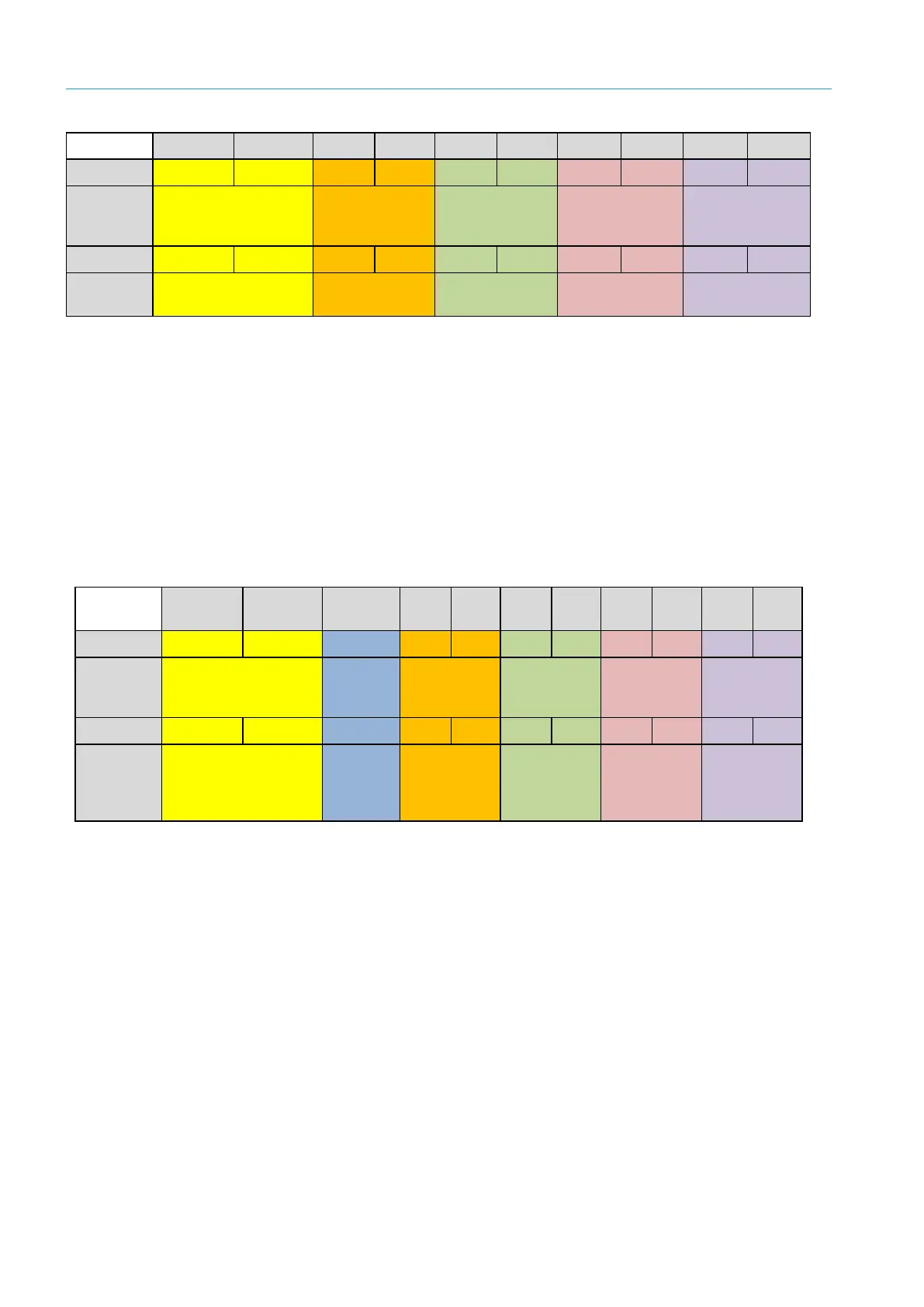
Function
Command
Single deep
diameter in
Double deep
diameter in
Single deep distance
in mm
Double deep
in mm
Single and double deep
125/10 mm
125/10 mm
350 mm 1,666 mm
All parameters are evaluated as WORD in the controller.
As a response to parameterization in Single and Double deep modes, the device sends
status bytes <00><20>. These status bytes are reset to <00><00> after successful
parameterization.
Command 5: “Parameterization of evaluation with target region for single deep:
<02> <00>”
If the first byte (Command_H) equals <02>, then the device evaluates the 9 bytes
following the command bytes as parameters for specialist processing with several
positioning marks in the image for Single deep mode. An evaluation mode with a
target region is usually used for this purpose. In this evaluation mode, only a section of
the entire camera image is evaluated, not the whole image. Non-relevant circles are
hidden. Activation leads to parameter change, but not to recalibration:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8 Byte 9
Byte
Byte
Function
Command Selection
Relative offset
to origin X in
Relative offset
to deviation Y in
Tolerance X in
1/10 mm
Tolerance Y in
1/10 mm
example 5 Specialist single deep
parameterization
“9 target
region –
best
100/10 mm
= 10 mm
–200/10 mm
= –20 mm
500/10 mm
= 50 mm
300/10 mm
= 30 mm
The Selection (evaluation mode) parameter in byte 3 is evaluated as BYTE in the
controller. All other parameters are evaluated as WORD in byte 4 to byte 11.
As a response to specialist single deep parameterization, the device sends status
bytes <00><40>. These status bytes are reset to <00><00> after successful
parameterization.
Command 6: “Parameterization of evaluation with target region for double deep:
<03> <00>”
If the first byte (Command_H) equals <03>, then the device evaluates the 9 bytes
following the command bytes as parameters for specialist processing with several
positioning marks in the image for Double deep mode. An evaluation mode with a
target region is usually used for this purpose. In this evaluation mode, only a section of
the entire camera image is evaluated, not the whole image. Non-relevant circles are
hidden. Activation leads to parameter change, but not to recalibration: