Instructions
9.1 PID_Compact
PID control
Function Manual, 03/2017, A5E35300227-AC
287
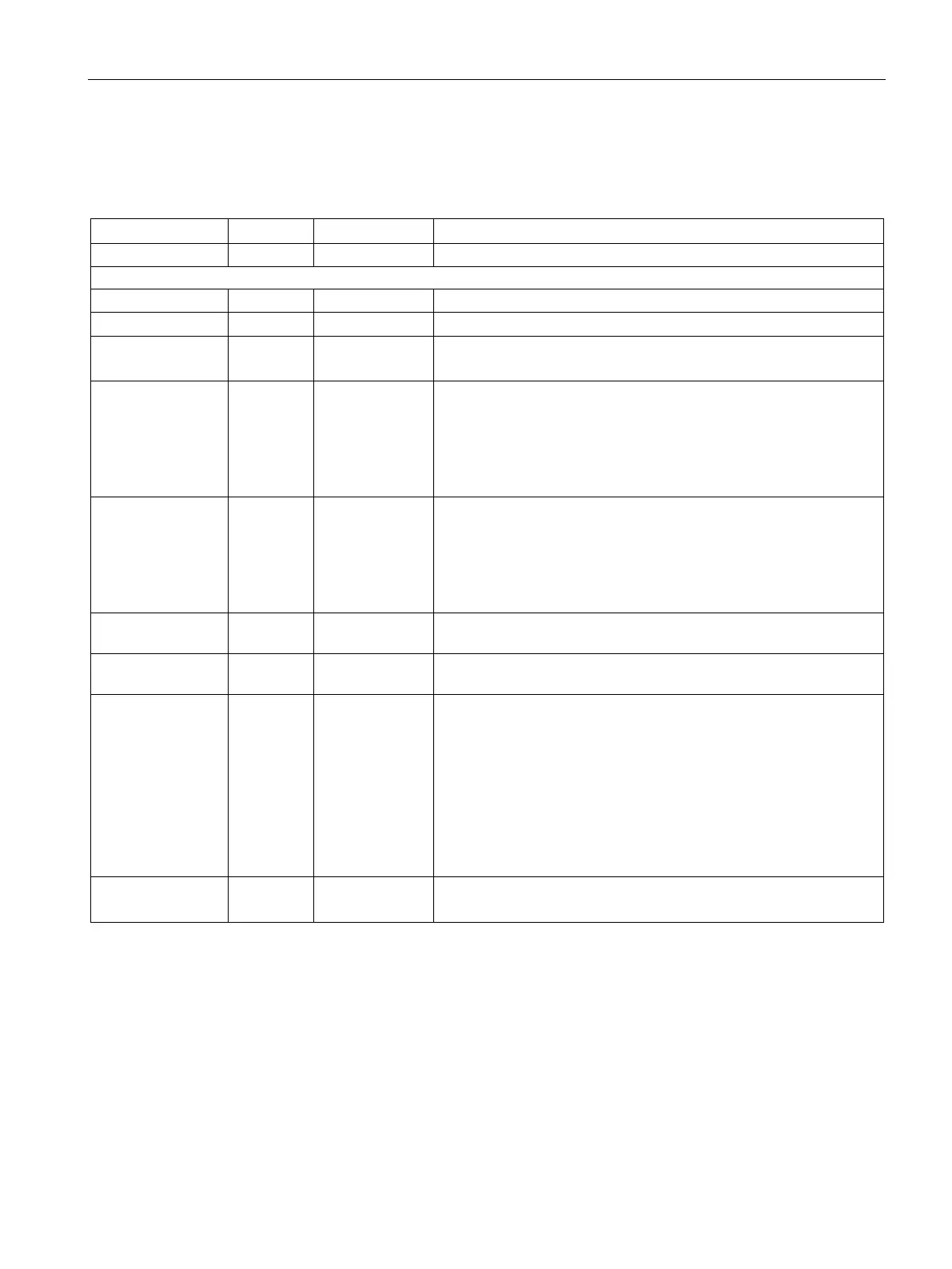
Output parameters of PID_Compact V1
Table 9- 5 Output parameters of PID_Compact V1
Output of the scaled process value
Outputs "Output", "Output_PER", and "Output_PWM" can be used concurrently.
Output value in REAL format
Output_PER WORD W#16#0 Analog output value
Output_PWM BOOL FALSE Pulse-width-modulated output value
The output value is formed by minimum On and Off times.
SetpointLimit_H BOOL FALSE If SetpointLimit_H = TRUE, the setpoint absolute high limit is
reached. The setpoint in the CPU is limited to the configured setpoint
absolute high limit. The configured process value absolute high limit
is the default for the setpoint high limit.
If you set sPid_Cmpt.r_Sp_Hlm to a value within the process value
limits, this value is used as the setpoint high limit.
SetpointLimit_L BOOL FALSE If SetpointLimit_L = TRUE, the setpoint absolute low limit has been
reached. In the CPU, the setpoint is limited to the configured setpoint
absolute low limit. The configured process value absolute low limit is
the default setting for the setpoint low limit.
If you set sPid_Cmpt.r_Sp_Llm to a value within the process value
limits, this value is used as the setpoint low limit.
InputWarning_H BOOL FALSE If InputWarning_H = TRUE, the process value has reached or ex-
ceeded the warning high limit.
InputWarning_L BOOL FALSE If InputWarning_L = TRUE, the process value has reached or fallen
below the warning low limit.
State INT 0 The State parameter (Page 293) shows the current operating mode
of the PID controller. To change the operating mode, use variable
sRet.i_Mode.
• State = 0: Inactive
• State = 1: pretuning
• State = 2: fine tuning
• State = 3: Automatic mode
• State = 4: Manual mode
Error DWORD W#16#0 The Error parameter (Page 297) indicates the error messages.
Error = 0000: No error pending.

 Loading...
Loading...















