Instructions
9.1 PID_Compact
PID control
288 Function Manual, 03/2017, A5E35300227-AC
Static tags of PID_Compact V1
You must not change tags that are not listed. These are used for internal purposes only.
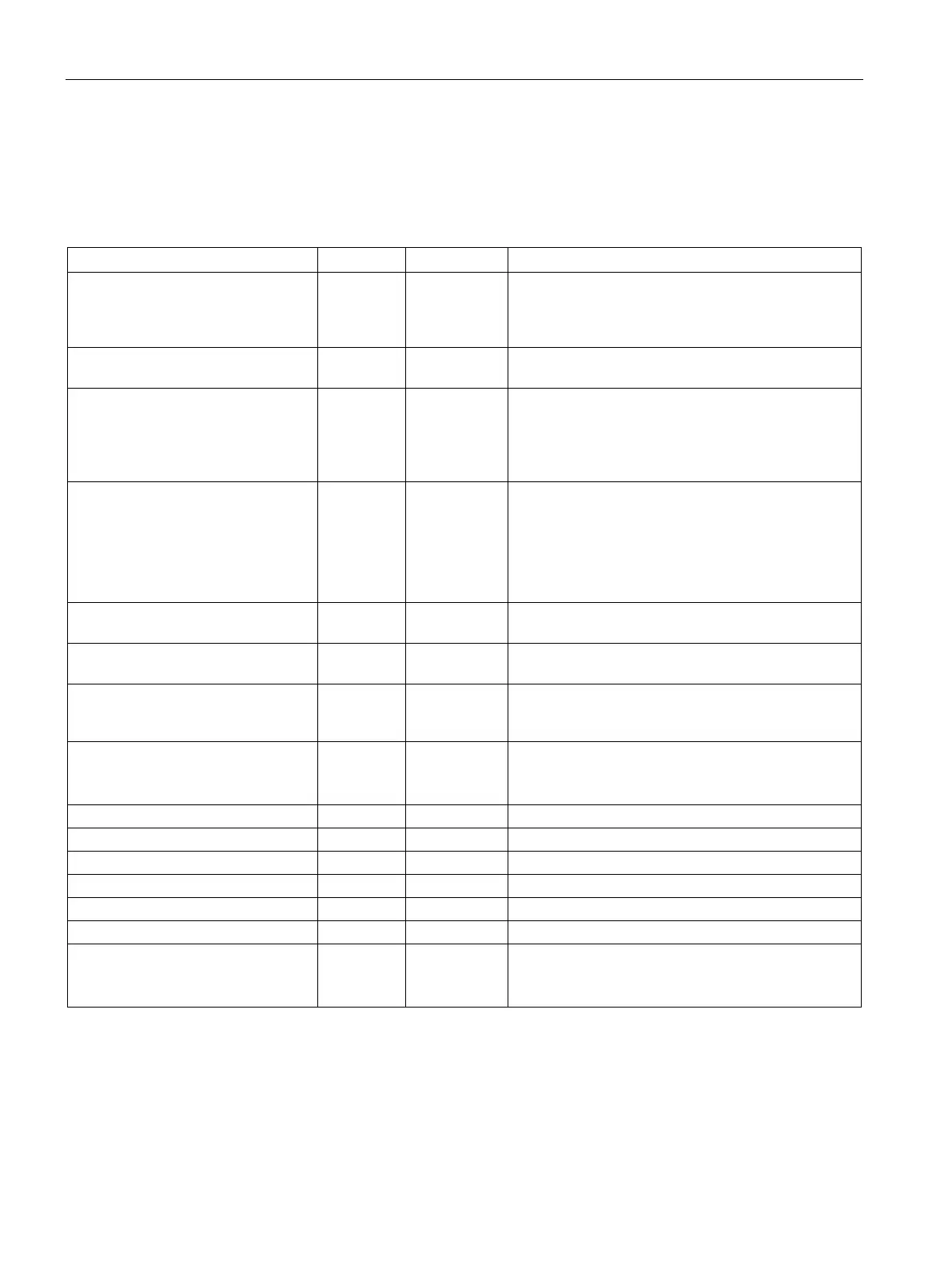
Table 9- 6 Static tags of PID_Compact V1
sb_GetCycleTime BOOL TRUE If sb_GetCycleTime = TRUE, the automatic determi-
nation of the cycle time is started. Cy-
cleTi
me.StartEstimation = FALSE once measurement
is complete.
sb_EnCyclEstimation BOOL TRUE If sb_EnCyclEstimation = TRUE, the PID_Compact
sampling time is not monitored.
sb_EnCyclMonitoring BOOL TRUE If sb_EnCyclMonitoring = FALSE, the PID_Compact
sampling time is not monitored. If it is not possible to
execute PID_Compact within the sampling time, an
0800 error is not output and PID_Compact does not
change to "Inactive" mode.
sb_RunModeByStartup BOOL TRUE Activate Mode after CPU restart
If sb_RunModeByStartup = FALSE, the controller will
remain inactive after a CPU startup.
After a CPU startup and if sb_RunModeByStartup =
TRUE, the controller will return to the most recently
si_Unit INT 0 Unit of measurement of the process value and set-
si_Type INT 0 Physical quantity of the process value and setpoint,
sd_Warning DWORD DW#16#0 Variable sd_warning (Page 300) displays the warn-
ings generated since the reset, or since the last
change of the operating mode.
sBackUp.r_Gain REAL 1.0 Saved proportional gain
You can reload values from the sBackUp structure
with sPid_Cmpt.b_LoadBackUp = TRUE.
Saved integral action time [s]
Saved derivative action time [s]
Saved derivative delay coefficient
Saved proportional action weighting factor
Saved derivative action weighting factor
Saved sampling time of PID algorithm
sPid_Calc.r_Cycle REAL 0.1 Sampling time of the PID_Compact instruction
r_Cycle is determined automatically and is usually
equivalent to the cycle time of the calling OB.

 Loading...
Loading...















