1FT6 Synchronous Motors
Configuration Manual, (PFT6), 10.2005 Edition, 6SN1197-0AD02-0BP1
4-11
Motor Components (Options)
Encoder
4.4.4 Absolute encoder
Function:
• Angular measuring system to impress current
• Speed actual value sensing
• Absolute measuring system for the position control loop
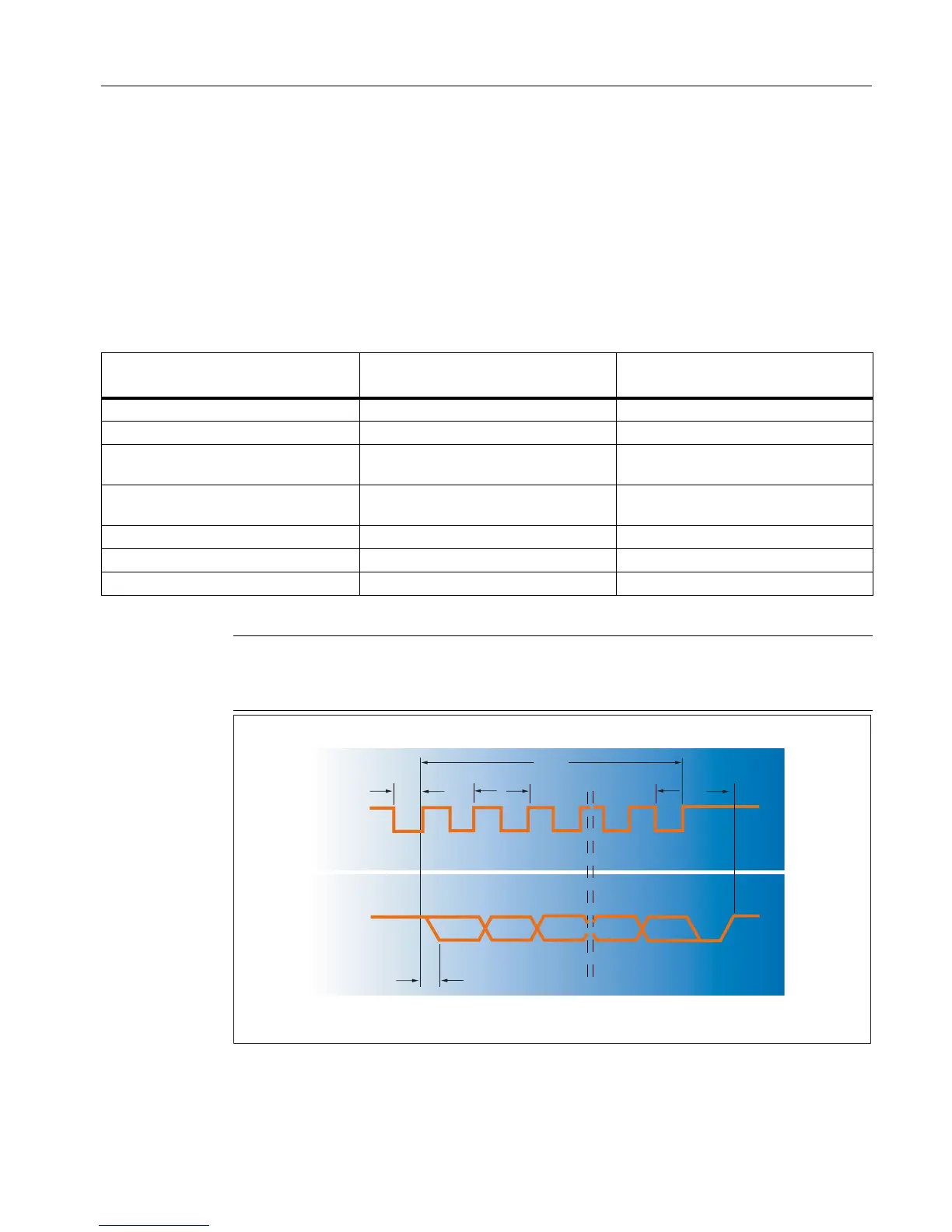
Fig. 4-4 Output signals, absolute encoders
Table 4-11 Technical data, absolute encoder
Features
Absolute encoder
EnDat (A–2048)
Absolute encoder
EnDat (A–512)
Operating voltage 5V ± 5% 5V ± 5%
Current consumption max. 300 mA max. 200 mA
Resolution, incremental (periods per
revolution)
2048 512
Resolution, absolute (coded revolu-
tions)
4096 4096
Incremental signals 1 Vpp 1 Vpp
Serial absolute position interface EnDat EnDat
Angular error ± 40" ± 80"
Note
As a result of the reduced maximum operating temperature of absolute encoders with respect
to incremental encoders, the thermally permissible rated motor torque is reduced by 10%.
&ORFNN+]0+]
&ORFN
'DWD
W
W
W
W
W
Q
Q
Q
Q
06%
/6%

 Loading...
Loading...










