Start-Up
SINUMERIK 802S base line
4-35
Start-Up
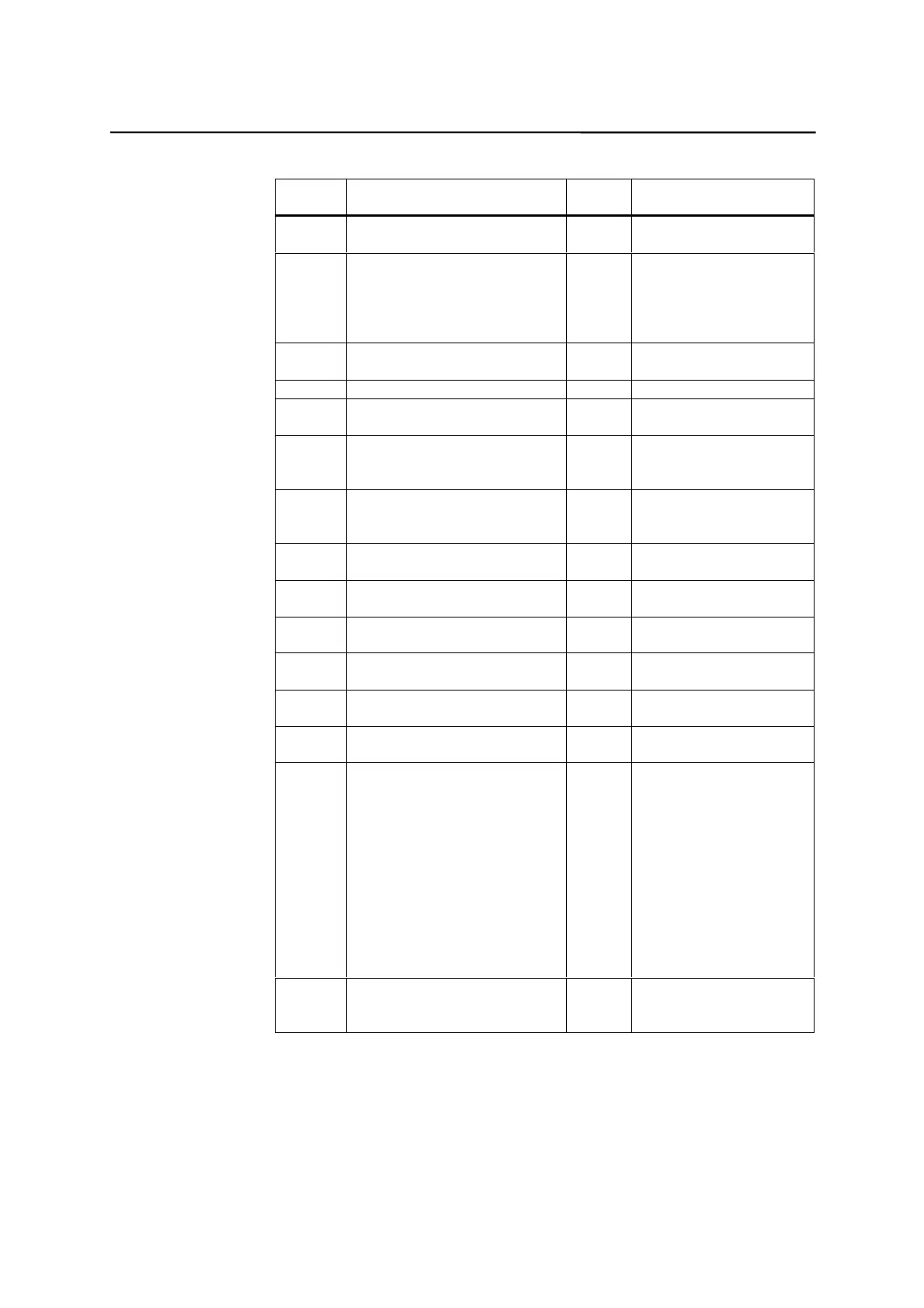
Number Description Default
Value
Setting or Remark
30130 Output type of setpoint
(setpoint branch): 0
02
30240 Type of actual value
acquisition (actual position
value) (encoder no.)
0: Simulation
3: Encoder for stepper motor
03
31020 Encoder markings per
revolution (encoder no.)
1000 Steps per stepper motor
revolution
31030 Pitch of leadscrew 10 Leadscrew pitch
31050
31060
Denominator load gearbox
(control parameter no.): 0...5
1 Load and resolver
transmission ratios
31100 Steps for monitoring rotation 2000 Repetition cycle of
BERO in measuring
system increments
31400 Schritte pro
Schrittmotorumdrehung
1000 Steps per stepper motor
revolution (must be
identical to MD 31020)
32000 Maximum axis velocity 10000 30000 (max. axis
velocity)
32100 Traversing direction (not
control direction)
1 Reversal of direction of
motion
32110 Sign actual value (control
direction) (encoder no.)
1 Measuring system
reversal
32200 Servo gain factor (control
parameter set no.): 0...5
2,5 2.5 (position controller
gain)
32260 Rated motor speed (setpoint
branch): 0
3000 Motor speed
34070 Reference point positioning
velocity
300 Positioning speed when
referencing
34200 Type of position measuring
system
0: No ref. point appr.; if
absolute encoder exists:
REFP_SET_POS accepted
1: Zero pulse (on encoder
track)
2: BERO
3: Distance–coded reference
marks
4: Bero with two edges
5: BERO cam
1 2: Single-edge BERO
4: Double-edge BERO
36200 Threshold value for velocity
monitoring (control parameter
set no.): 0...5
11500 Threshold value for
velocity monitoring

 Loading...
Loading...









