Simrad AP50 Autopilot
20 20221032 / E
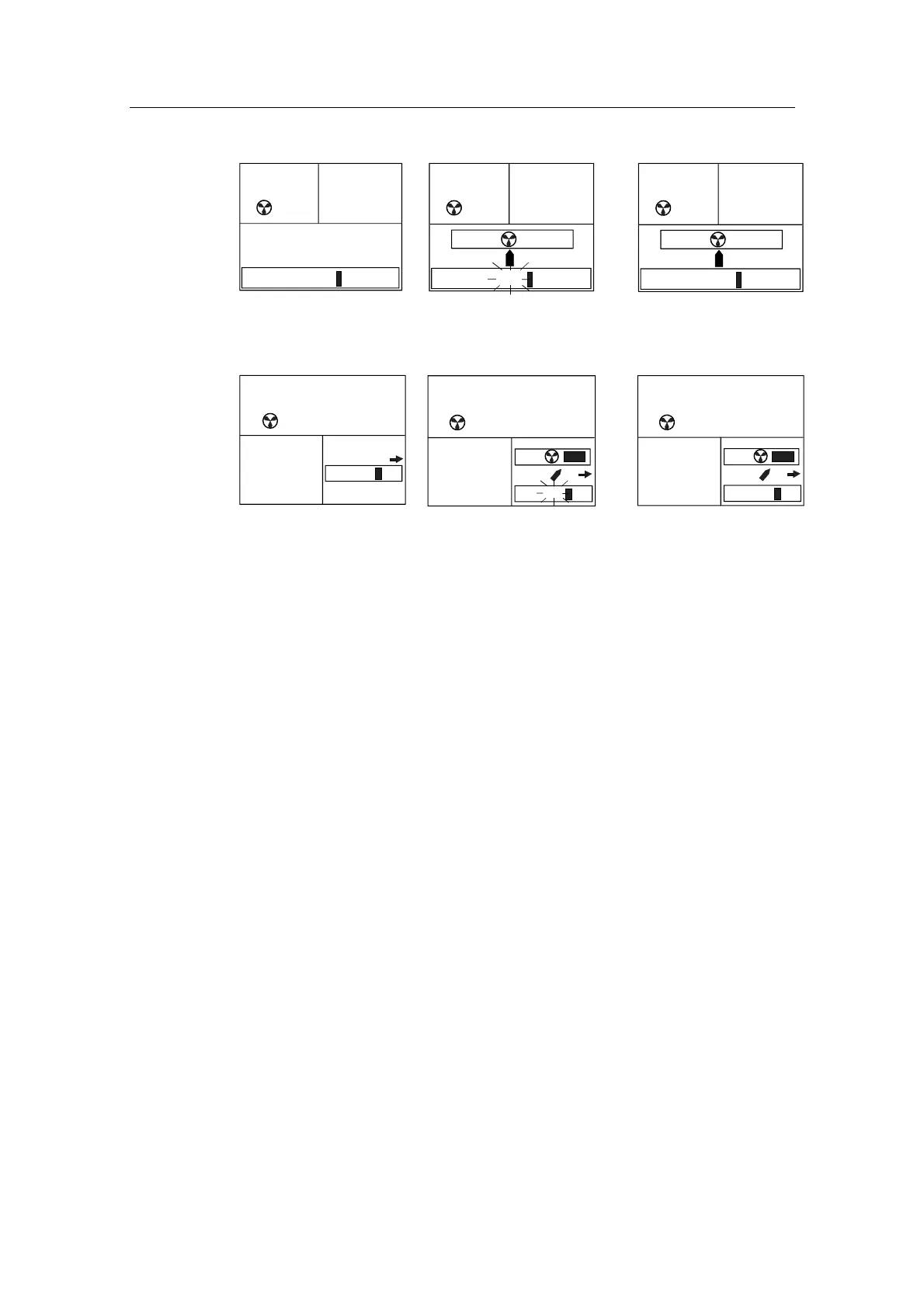
STANDBY
mode
(Follow-up
and Non-
follow up
steering
modes)
02
340.
7
Gyro1
S
TBY
RUDDER
Heading to be
maintained by rudder
02
340.
7
Gyro1
S
TBY
Heading to be maintained
by thruster
02
340.
7
Gyro1
S
TBY
Heading to be maintained
by rudder and thruster
AUTO-
WORK
mode
271
02
RUDDER
A
w
263.
7
Gyro1
271
A
w
263.
7
Gyro1
02
271
A
w
263.
7
Gyro1
02
Heading maintained
by rudder
Heading maintained by
thruster
Heading maintained by
rudder and thruster
Caution ! When operating an On/Off thruster it is important to note that
most electrical thrusters have a built in thermal cut-off switch
that will shut off the electromotor if it is overheating and re-
engage it when it has cooled down. The water temperature also
affects the running time. The On/Off thruster may only run for
a few minutes, and its total running time for a longer period
should be limited by increasing the thruster sensitivity value
(Refer to the Installation Manual, Installation Menu/Settings/
Thruster/Thruster Sens).
2.8 Navigating with the AP50
The AP50 has the capability to use steering information from an
external navigator (GPS/Chart plotter or ECS) to direct the boat
to one specific waypoint location or through a series of
waypoints. In the NAV mode, the AP50 uses the heading sensor
as its heading source for course keeping. The steering and speed
information received from the external navigator alters the set
course to direct the AP50 to the destination waypoint.
Note ! Navigational steering must only be used in open waters. By
selecting the NAV mode, the AP50 is set for automatic steering
on the current set course to a destination waypoint.
To obtain satisfactory navigation steering, the following
conditions must be fulfilled prior to entering the NAV mode:
• The AP50 autosteering must be tested and determined
satisfactory