CL86T(V4.0) Closed Loop Stepper Drive User Manual
Many of the problems that affect motion control systems can be traced to electrical noise, controller software
errors, or mistake in wiring.
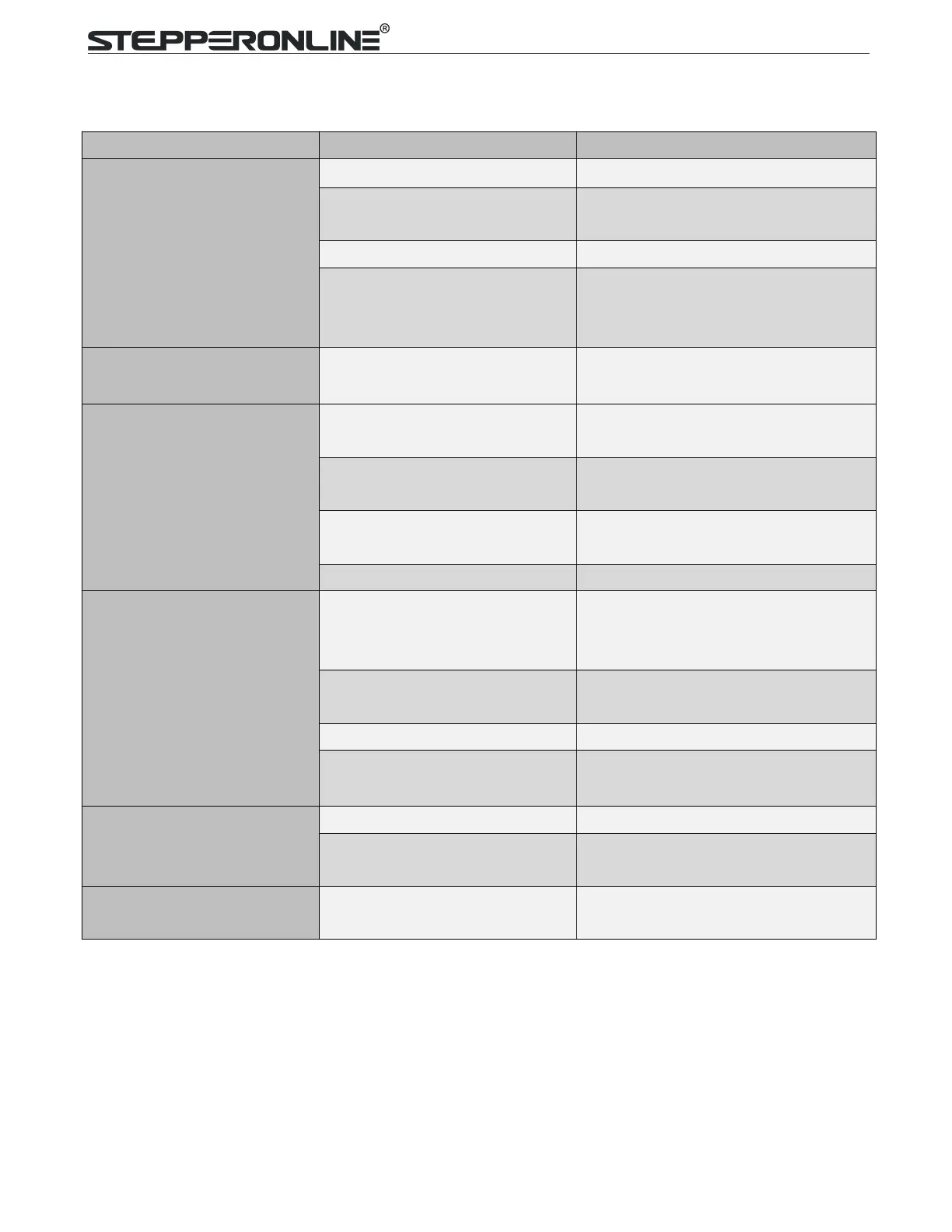
Connect power supply correctly
Microstep resolution setting is
wrong
Setting appropriate microstep
Check wiring and restart power
Drive restore factory setting, and keep
ENA+, ENA- input signals
unconnected.
Wrong motor rotation
direction
The Direction signal level is
reverse
Toggling the SW5 DIP switch
Control signal is too weak
Ensure the current of control signal is
within 7-16mA
Control signal is interfered
Don’t tie the control signal cable with
power cable together
Refer to user manual of drive and
motor datasheet
Something wrong with motor coil
Check the motor is normal
Motor stalls during
acceleration
Current setting is too small
Choose another power supply with
lager power or increase the output
current of drive
Motor is undersized for the
application
Choose another motor with higher
torque
Acceleration is set too high
Power supply voltage too low
Choose another power supply with
large voltage output
Excessive motor & drive
heating
Inadequate heat sinking / cooling
Motor peak current setting is too
high
Reduce the current value refer to
motor datasheet
Motor vibration when power
on
Speed loop Kp is too high
Reduce the speed loop Kp value