■ Lors du nettoyage ou de la maintenance de la
tondeuse, l'utilisateur risque de se couper en
entrant en contact avec les lames acérées.
L’utilisateur risque d'être blessé.
►
Porter des gants de travail en matière résis‐
tante.
■ Si le cordon d'alimentation électrique du bloc
d'alimentation secteur est défectueux ou
endommagé :
►
Remplacer le bloc d'alimentation secteur.
■ Si le bouchon de la prise de diagnostic située
sur la face inférieure du robot de tonte n'est
pas monté correctement, de l'humidité et des
saletés peuvent pénétrer dans le robot de
tonte. Cela risquerait d'endommager le robot
de tonte.
►
Vérifier le montage correct du bouchon à
chaque nettoyage et à chaque remplace‐
ment des lames.
►
Ne pas utiliser le robot de tonte sans bou‐
chon ou avec un bouchon endommagé.
5 Description du fonctionne‐
ment
5.1 Description de la fonction
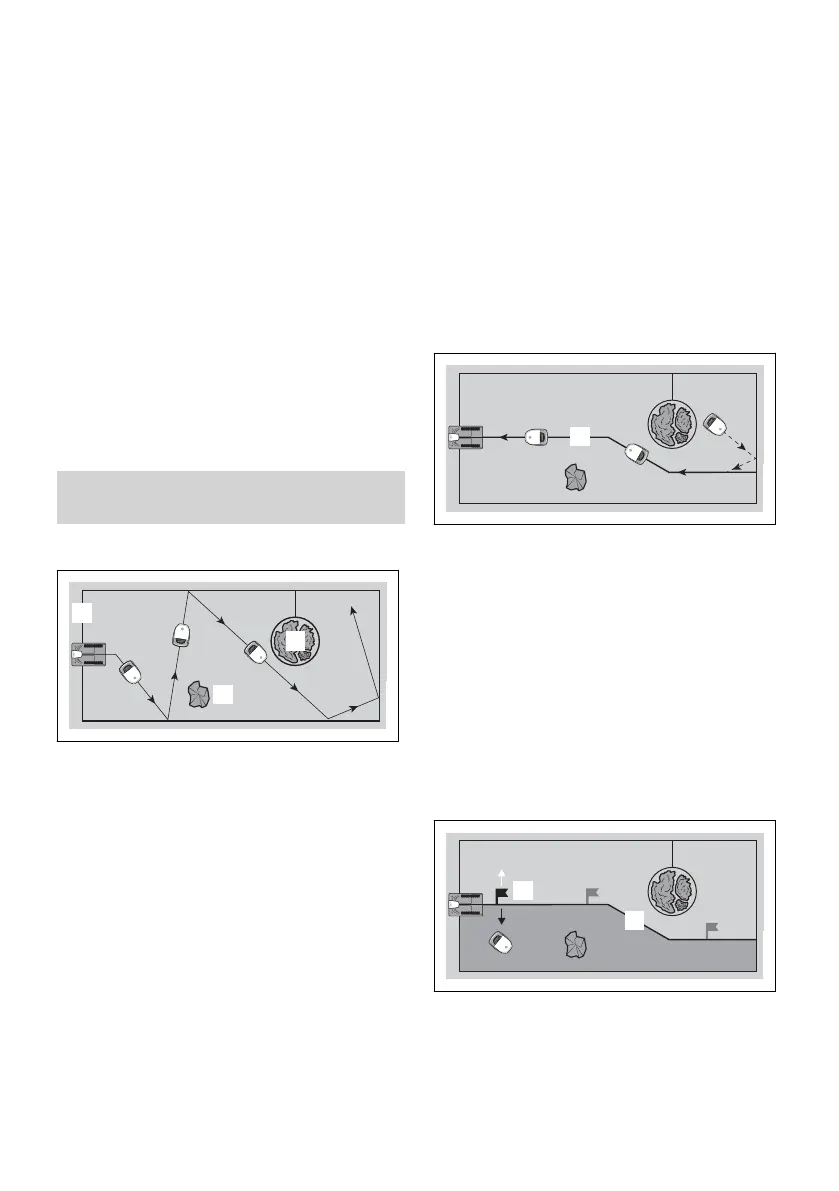
Le robot de tonte coupe l'herbe en effectuant un
parcours défini au hasard. Afin que le robot de
tonte reconnaisse les limites de la surface à ton‐
dre, il faut poser un fil de délimitation (1) sur la
périphérie de la surface à tondre.
Le fil de délimitation (1) transmet un signal au
robot de tonte. Le signal est généré par la station
d'accueil.
À l'aide de capteurs à ultrasons et d'un capteur
de chocs ou capteur d'obstacles, le robot de
tonte peut détecter les obstacles fixes (2) qui se
trouvent sur la surface à tondre.
Lorsque le robot de tonte détecte un obstacle
fixe (2), il ralentit, heurte l'obstacle fixe et repart
ensuite dans une autre direction.
Les zones (3) sur lesquelles le robot de tonte ne
doit pas passer et les obstacles qu'il ne doit pas
heurter doivent être exclus de la surface à ton‐
dre, à l'aide du fil de délimitation (1).
Lorsque le robot de tonte détecte une zone inter‐
dite par le fil de délimitation (3), il ralentit et
repart dans une autre direction.
En mode de tonte, le robot de tonte quitte lui-
même la station d'accueil et coupe l'herbe.
Pour la commande du robot de tonte, on utilise
l'application « MY iMOW
®
» et les touches du
tableau de commande du robot de tonte. Des
bandeaux lumineux montés sur le robot de tonte
ainsi qu'un système de synthèse vocale infor‐
ment sur l'état actuel du robot de tonte.
Au cours de la tonte, lorsque le niveau de charge
de sa batterie devient faible, le robot de tonte
cherche le fil de guidage (4) le plus proche. Une
fois qu'il a détecté un fil de guidage (4), le robot
de tonte suit ce fil pour retourner à la station
d'accueil. La station d'accueil recharge la batte‐
rie. Il faut donc poser au moins un fil de gui‐
dage (4) sur la surface à tondre. Il est possible
de poser au maximum deux fils de guidage. Si
l'on veut interrompre la tonte ou faire recharger
la batterie, il est également possible de renvoyer
directement le robot de tonte à la station d'ac‐
cueil à l'aide de l'application « MY iMOW
®
» ou
de la touche « Maison ».
Sur un fil de guidage (4), on peut fixer jusqu'à
trois points de départ (5). Le robot de tonte peut
aller directement au point de départ respectif, à
partir duquel il commence à tondre.
À l'aide du fil de guidage (4), on peut subdiviser
la surface à tondre en plusieurs zones (par
français 5 Description du fonctionnement
106 0458-011-9601-A
 Loading...
Loading...










