Il robot rasaerba falcia l'erba procedendo su
traiettorie casuali. Per fare in modo che il robot
rasaerba riconosca i confini della superficie di
falciatura, è necessario posare un filo perime‐
trale (1) sul limite esterno della superficie.
Il filo perimetrale (1) trasmette un segnale al
robot rasaerba generato dalla docking station.
Gli ostacoli fissi (2) presenti sulla superficie di
falciatura vengono rilevati dal robot rasaerba
mediante sensori a ultrasuoni e un sensore anti‐
urto.
Se il robot rasaerba rileva un ostacolo fisso (2),
rallenta la sua corsa, urta l'ostacolo e continua la
sua marcia in un'altra direzione.
Le aree (3) sulle quali il robot rasaerba non può
transitare e gli ostacoli che non deve urtare
devono essere delimitati dalla superficie di falcia‐
tura rimanente mediante il filo perimetrale (1).
Se il robot rasaerba rileva un'area delimitata (3),
rallenta la sua corsa e continua la marcia in
un'altra direzione.
In modalità di falciatura, il robot rasaerba lascia
la docking station automaticamente e taglia
l'erba.
Il robot rasaerba può essere comandato tramite
l'app "MY iMOW
®
" e tramite i tasti sul quadro di
comando del robot rasaerba stesso. La barra
luminosa sul robot rasaerba e la guida vocale
riprodotta artificialmente forniscono informazioni
sullo stato corrente del robot rasaerba.
Se la carica della batteria è bassa, durante la fal‐
ciatura il robot rasaerba cerca il filo guida più
vicino (4). Una volta rilevato un filo guida (4), il
robot rasaerba torna automaticamente alla doc‐
king station. La docking station ricarica la batte‐
ria. Nella superficie di falciatura deve essere
posato almeno un filo guida (4). È possibile
posare al massimo due fili guida. Se si deve
interrompere il taglio o caricare la batteria, è pos‐
sibile inviare il robot rasaerba direttamente alla
docking station tramite l'app "MY iMOW
®
" o pre‐
mendo il pulsante "Home".
Su un filo guida (4) si possono impostare fino a
tre punti di partenza (5). Il robot rasaerba può
raggiungere direttamente il punto di partenza
definito e iniziare la falciatura da qui.
Il filo guida (4) consente di suddividere la superfi‐
cie di falciatura in varie zone (ad esempio: A e
B). Le zone vengono definite da un punto di par‐
tenza (5). Partendo dal punto di partenza scelto,
il robot rasaerba può essere indirizzato verso
sinistra o destra nella zona desiderata. A questo
punto il robot rasaerba può eseguire la falciatura
in modo mirato nella zona selezionata. I punti di
partenza e le zone vengono gestiti tramite l'app
"MY iMOW
®
" e possono essere inseriti nello
schema di taglio.
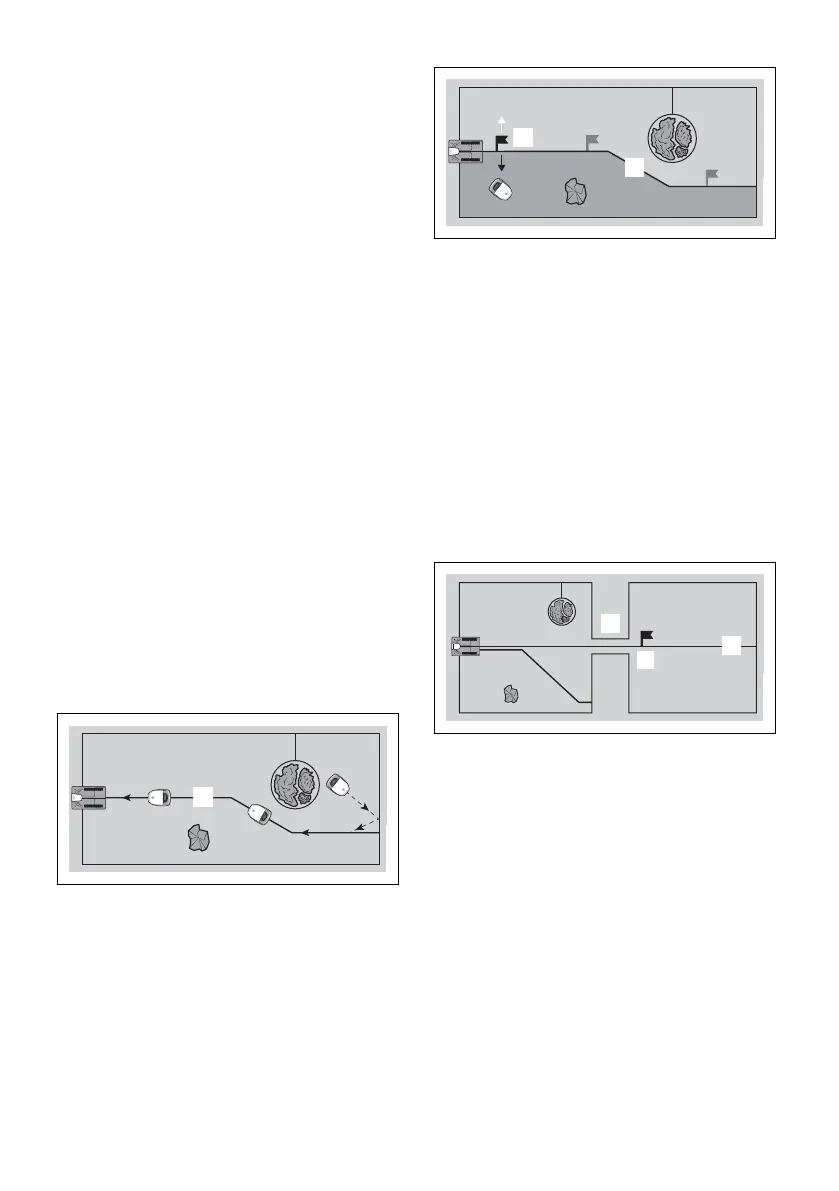
Se sulla superficie di falciatura è presente una
strettoia (6), il robot rasaerba percorre questo
punto a condizione che venga rispettata una
determinata distanza minima tra i fili perimetrali.
Se non si riesce a rispettare la distanza minima,
occorre posare un filo guida (7) attraverso la
strettoia (6). Il filo guida (7) guida il robot in modo
mirato attraverso la strettoia (6) fino a un punto
di partenza (8). A partire dal punto di par‐
tenza (8) il robot rasaerba può falciare a valle
della strettoia (6). La frequenza con cui il punto
di partenza (8) viene raggiunto dal robot
rasaerba può essere definita nell'app
"MY iMOW
®
" e inserita nello schema di taglio.
5 Descrizione del funzionamento italiano
0458-011-9601-A 153
 Loading...
Loading...










