SunFounder PiCrawler Kit
3.1.6 Servo Adjust
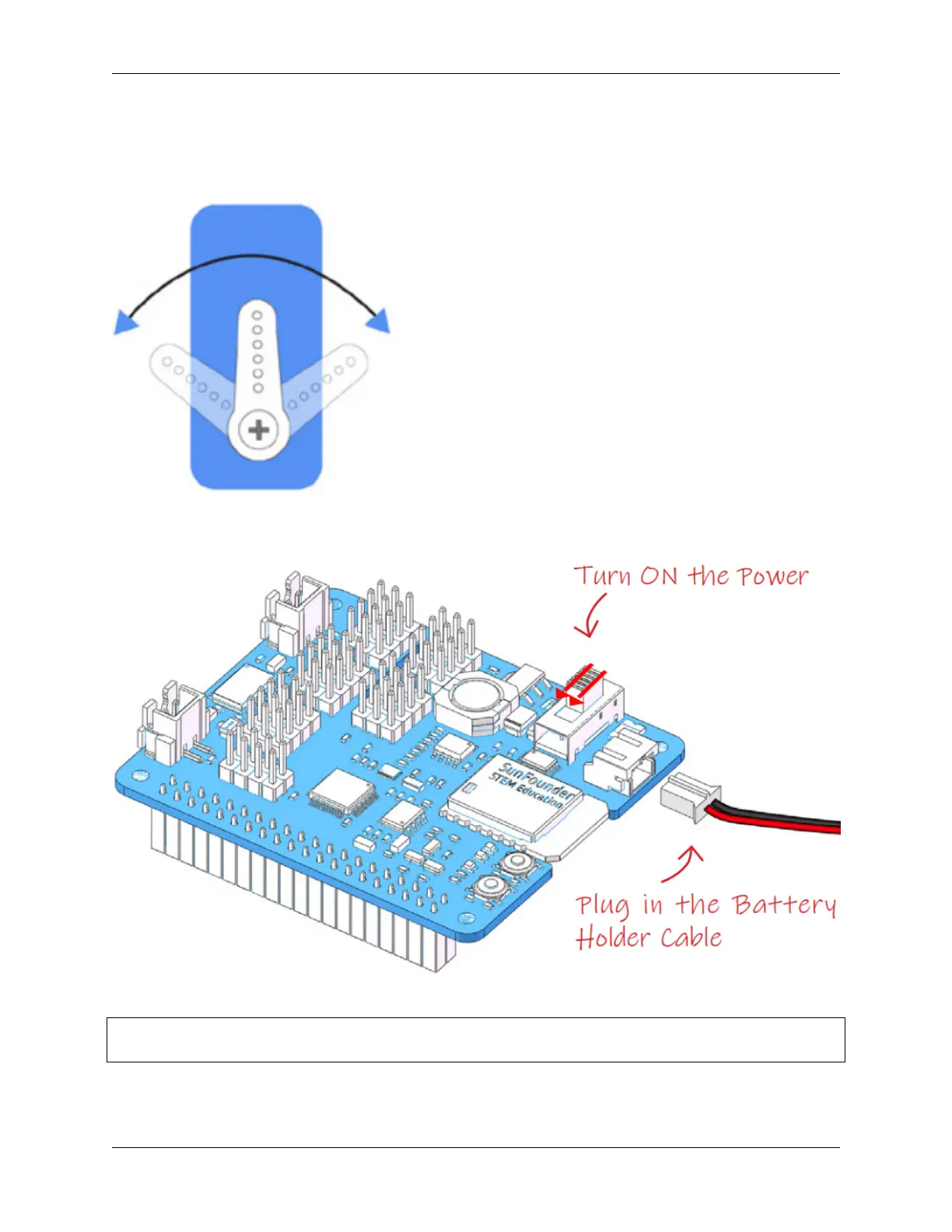
To ensure that the servo has been properly set to 0°, first insert the rocker arm into the servo shaft and then gently
rotate the rocker arm to a different angle.
Follow the instructions on the assembly foldout, insert the battery holder cable and turn the power switch to the ON.
Wait for 1-2 minutes, there will be a sound to indicate that the Raspberry Pi boots successfully.
Now, run servo_zeroing.py in the examples/ folder.
cd /home/pi/picrawler/examples
sudo python3 servo_zeroing.py
42 Chapter 3. Play with Python