SunFounder PiCrawler Kit
3.11 Pose
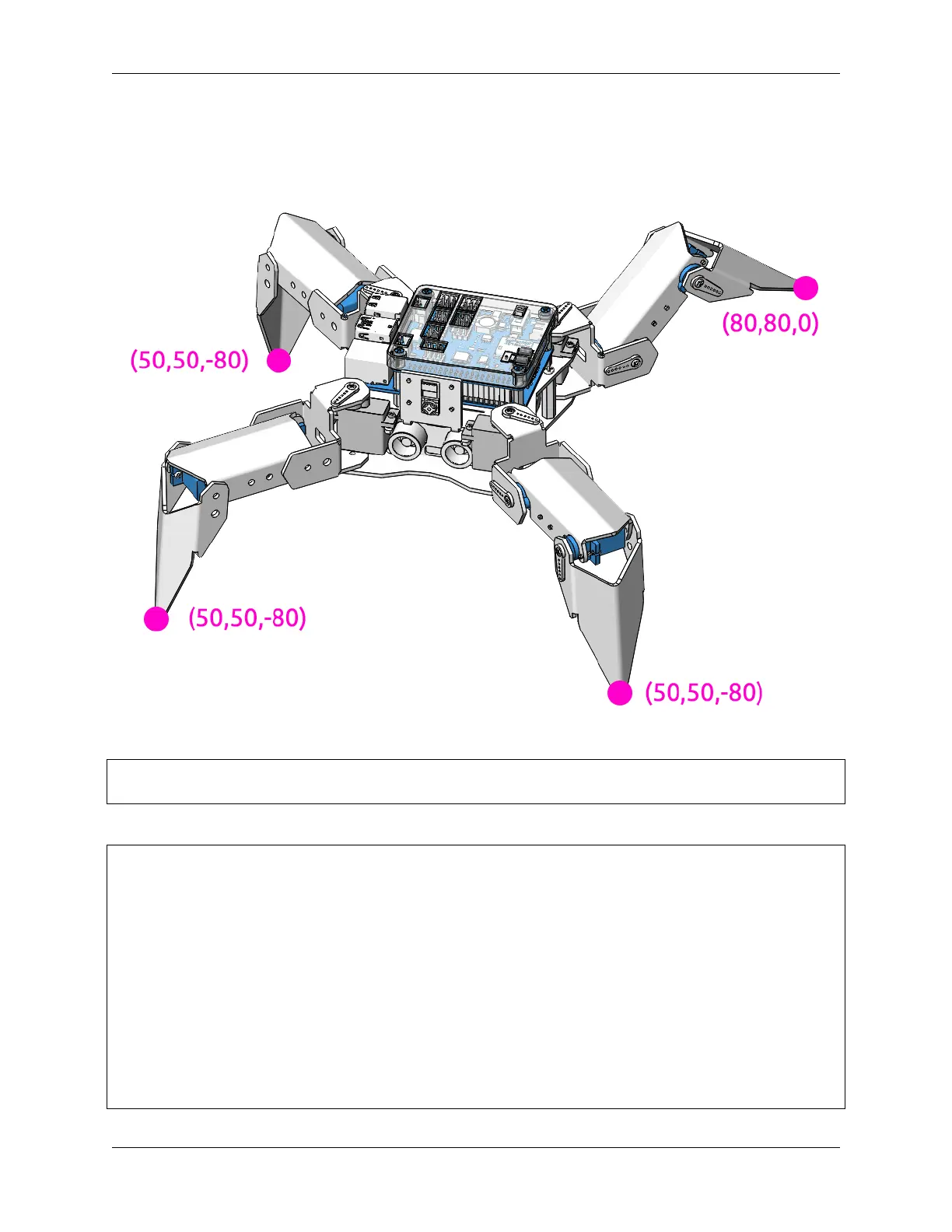
PiCrawler can assume a specific posture by writing a coordinate array. Here it assumes a raised right rear foot posture.
Run the Code
cd /home/pi/picrawler/examples
sudo python3 do_step.py
Code
from picrawler import Picrawler
from time import sleep
crawler = Picrawler([10,11,12,4,5,6,1,2,3,7,8,9])
#crawler.set_offset([0,0,0,0,0,0,0,0,0,0,0,0])
## [right front],[left front],[left rear],[right rear]
new_step=[[50, 50, -80], [50, 50, -80],[80, 80, 0], [50, 50, -80]]
def main():
speed = 100
while True:
(continues on next page)
3.11. Pose 71