Page 47 ETN040053-D03
KIM101 K-Cube Piezo Motor Controller
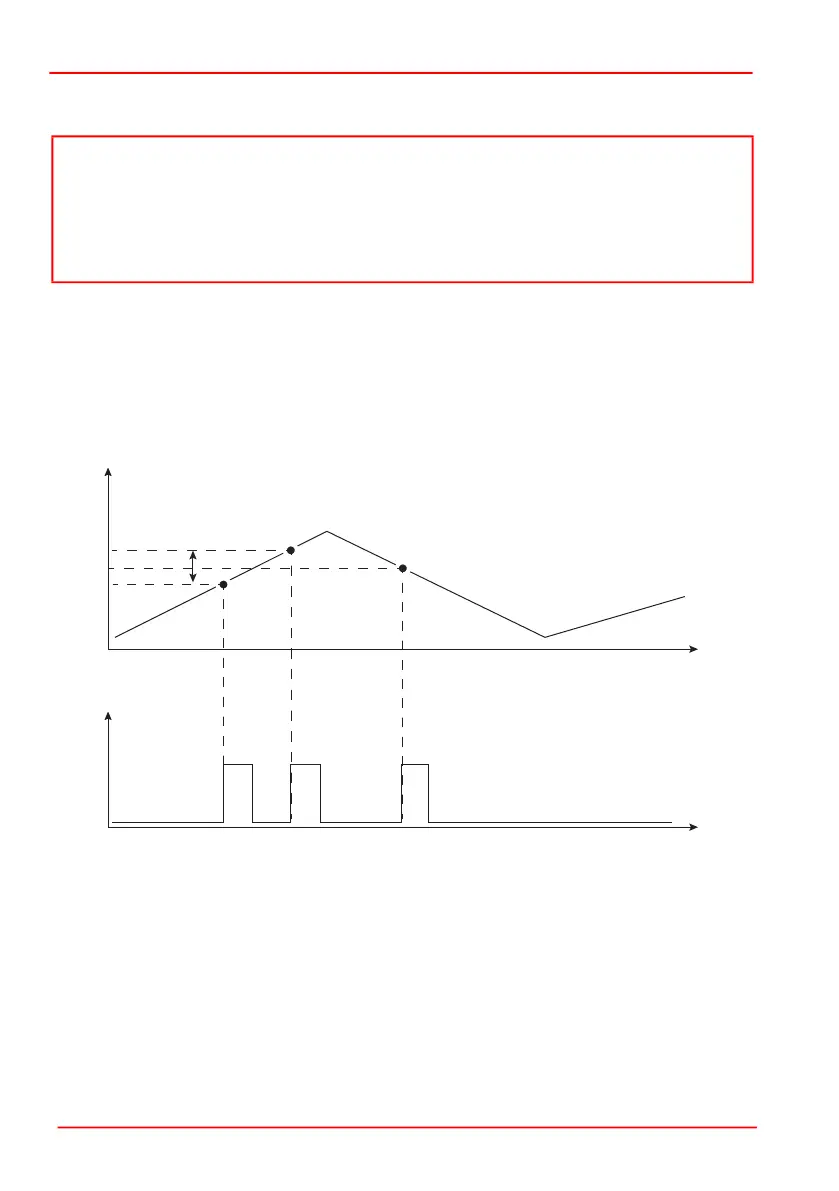
Example referring to Fig. 6.5 for a move from 0 to 2000 steps and back.
In forward direction: The first trigger pulse occurs at 1000 steps (StartPosFwd), the
next trigger pulse occurs after another 500 steps (PosIntervalFwd), the stage then
moves to 2000 steps.
In reverse direction: The next trigger occurs when the stage gets to 1200 steps.
Note that position triggering can only be used on one TRIG port at a time.
Fig. 6.5 Position Steps Triggering
Triggering Polarity - The polarity of the trigger pulse is specified in the Trigger Polarity
parameters for each trigger as follows:
Active is High - The active state of the trigger port is logic HIGH 5V (trigger input
and output on a rising edge).
Active is Low - The active state of the trigger port is logic LOW 0V (trigger input
and output on a falling edge).
Trigger Channel - The channel to which the trigger is associated.
Note
In the Trig Out Pos. Steps Fwd mode, the StartPos. Fwd value must be reached in
the forward direction for the subsequent trigger sequence to be performed correctly.
If StartPos. Fwd is reached in the reverse direction, the initial trigger will still be
activated, but any subsequent sequence could be corrupted. Similarly, StartPosRev
must be reached in reverse direction for the sequence to work correctly.
Step Count
Time
Time
Trig Voltage
Pos1 Fwd
Pos2 Fwd
Pos1 Rev
1000
1500
1200
5V
0V
StartPosFwd
StartPosRev
PosIntervalFwd