Printed in the Federal Republic of Germany TR-Electronic GmbH 2005, All Rights Reserved
07/30/2020 TR - ECE - BA - DGB - 0039 - 14 Page 47 of 107
8.2.1.5 Wiederholung mit 1-3 Pausentakten
Mit der Programmierung „Wiederholung mit 1-3 Pausentakten“ wird mit dem
zweiten Taktbüschel der gespeicherte Positionswert nochmals übertragen und dient
zur Erkennung von Übertragungsfehlern. Entsprechend der Auswahl können eins bis
max. drei Pausentakte eingefügt werden, bevor der zweite Taktbüschel beginnt.
Ein weiteres Taktbüschel überträgt ein neues aktualisiertes Datenwort. Ein Datenwort
wird also immer nur einmal wiederholt.
Die Datenbreite bei der Übertragung richtet sich nach der Einstellung unter dem
Parameter Anzahl Datenbits. Die Datenübertragung beginnt mit dem
höchstwertigen Bit (MSB) und enthält die Positionsbits (P).
Die Daten können beliebig, bezogen auf eine bestimmte Anzahl von Takten, durch
den Parameter Anzahl Datenbits verschoben werden. Die Daten können rechts –
oder linksbündig, mit und ohne führende „Nullen“ übertragen werden. Führende
„Nullen“ werden erzeugt, indem der Parameter Anzahl Datenbits größer
programmiert wird, als dies von der Gesamtmesslänge her nötig wäre.
Beispiel
Mess-System:
- 1024 Schritte/Umdrehung (10 Bits)
- 4096 Umdrehungen (12 Bits)
- --> Gesamtmesslänge = 22 Bits
- Code: Binär oder Gray
- Auswahl: Wiederholung mit 2 Pausentakten
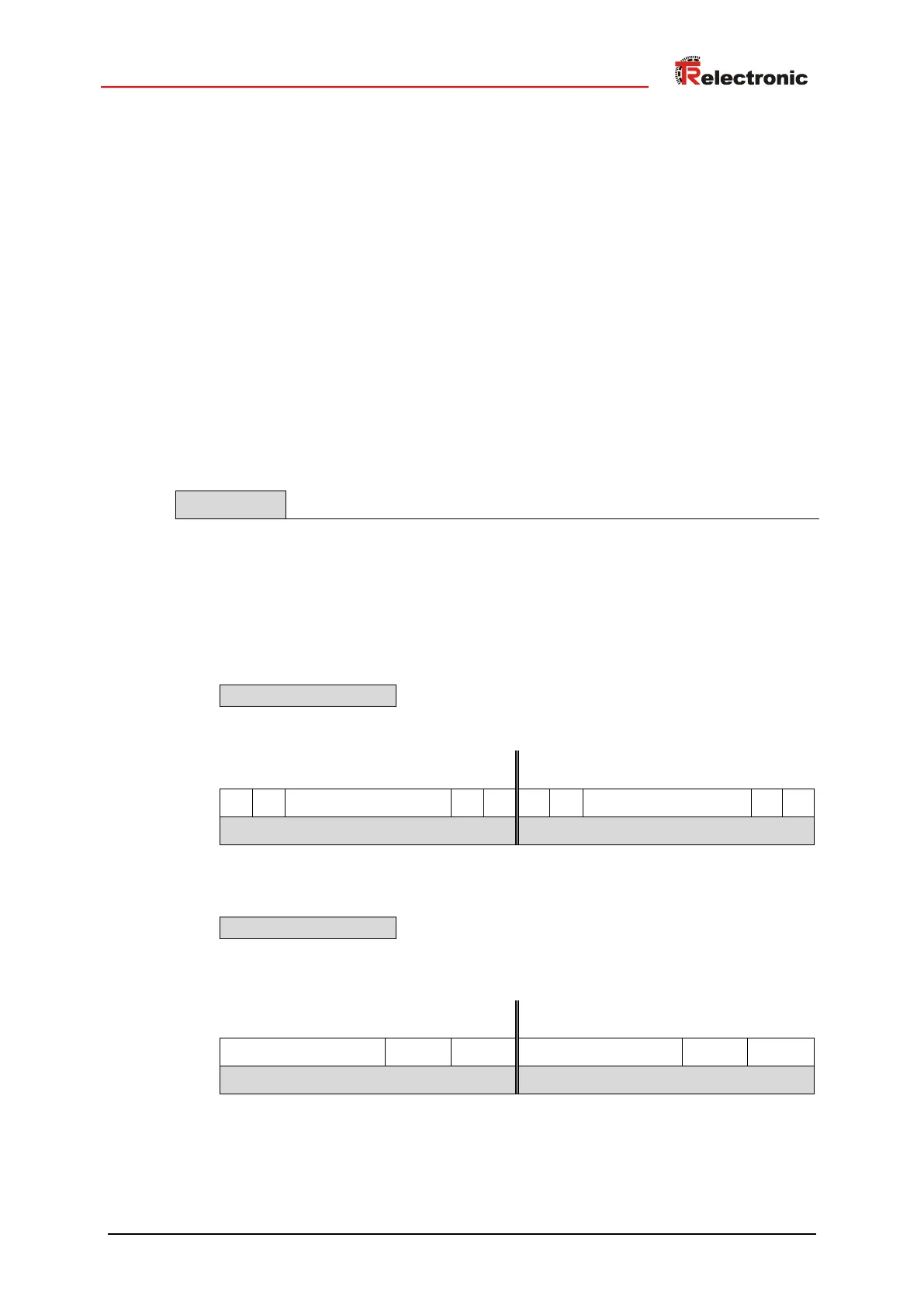
Programmierte Anzahl Datenbits = 24
0 0 P 2
21
– P 2
0
0 0 0 0 P 2
21
– P 2
0
0 0
Datenwort 1 Datenwort 2
Programmierte Anzahl Datenbits = 22
P 2
21
– P 2
0
0 0 P 2
21
– P 2
0
0 0
Datenwort 1 Datenwort 2