ZED-F9K-Integration manual
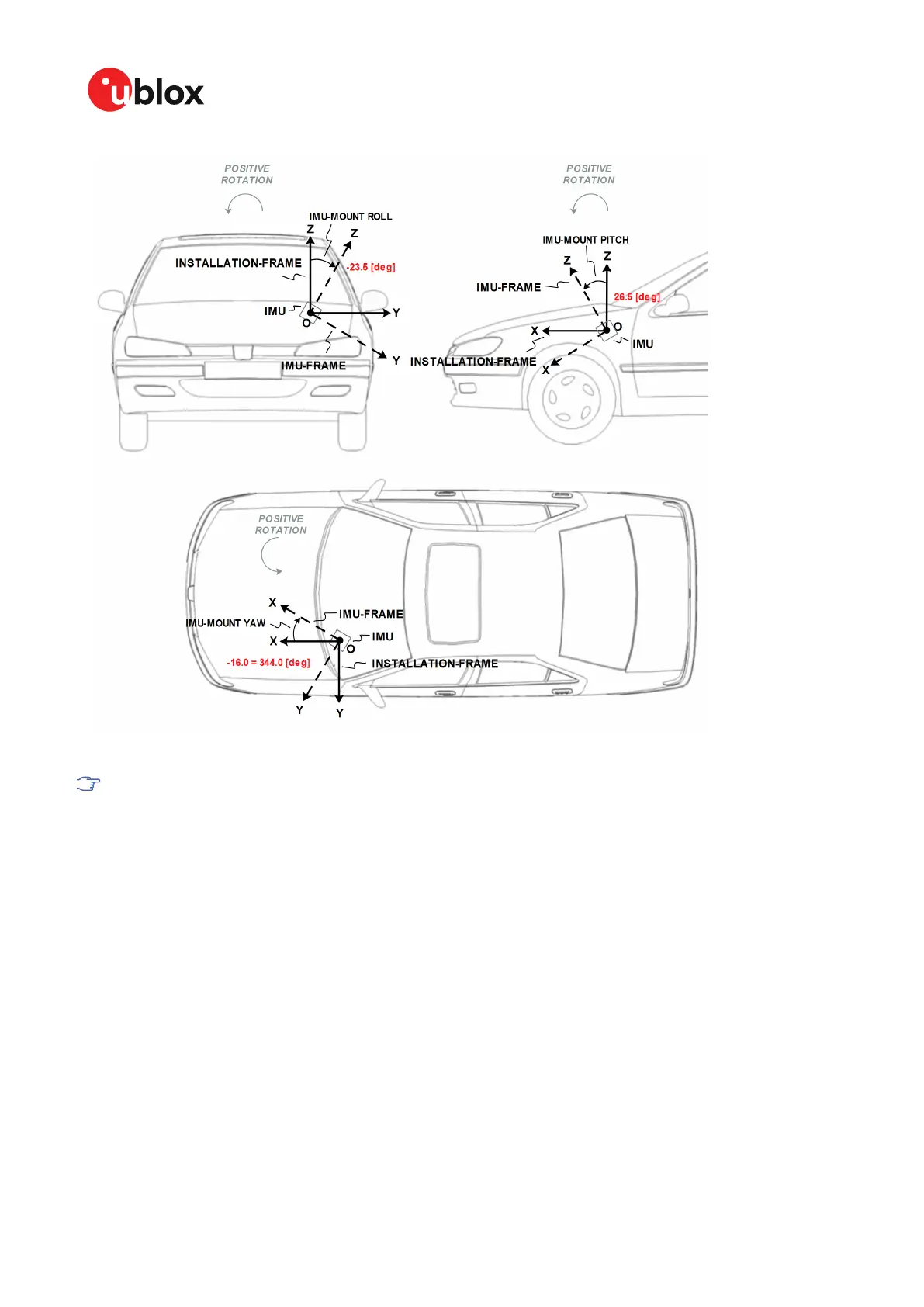
Figure 3: Installation frame
In order to prevent significant degradation of the positioning solution the IMU-mount
misalignment angles should be configured with an accuracy of less than 5 degrees.
The following list describes in detail how the CFG-SFIMU-IMU_MNTALG keys are to be interpreted
with respect to the example illustrated in the figure above:
•
CFG-SFIMU-IMU_MNTALG_YAW: The IMU-mount yaw angle (yaw) corresponds to the rotation
around the installation-frame z-axis (vertical) required for aligning the installation frame to
the IMU frame (yaw = 344.0 degrees if the IMU-mount misalignment is composed of a single
rotation around the installation-frame z-axis, that is, with no IMU-mount roll and IMU-mount
pitch rotation).
•
CFG-SFIMU-IMU_MNTALG_PITCH: The IMU-mount pitch angle (pitch) corresponds to the
rotation around the installation-frame y-axis required for aligning the installation-frame to
the IMU-frame (pitch = 26.5 degrees if the IMU-mount alignment is composed of a single
rotation around the installation frame y-axis, that is, with no IMU-mount roll and IMU-mount
yaw rotation).
•
CFG-SFIMU-IMU_MNTALG_ROLL: The IMU-mount roll angle (roll) corresponds to the
rotation around the installation-frame x-axis required for aligning the installation frame to
the IMU frame (roll = -23.5 degrees if the IMU-mount misalignment is composed of a single
UBX-20046189 - R01
3 Receiver functionality Page 18 of 105
C1-Public Early production information
 Loading...
Loading...