2024 Unitree Robotics. All rights reserved.10
Unitree4D LiDAR-L2 User Manual
Point Cloud Data
The L2 can only choose one way to output data from ENET UDP and TTL UART, which can be select-
ed through Unilidar 2 or SDK.
By default, the L2 starts to output point cloud data after being powered on. The point cloud data
includes distance values, angles, reflectivity, IMU data and working status data.
The point cloud data is the synthesis of all point clouds detected on the surface of the measured
object within the field of view by the laser detection rangefinder. Each point cloud data mainly con-
tains the following information:
Distance value: The actual distance between sampling points, in millimeters. Angle: The angle of the
sampling point relative to the orientation of the L2 itself, in degrees. Reflectivity: The reflectivity of
the detected object.
IMU data: Data of 3 - axis accelerometer and 3 - axis gyroscope.
Working status data: The current rotational speed, voltage, temperature, etc. of the laser detection
rangefinder.
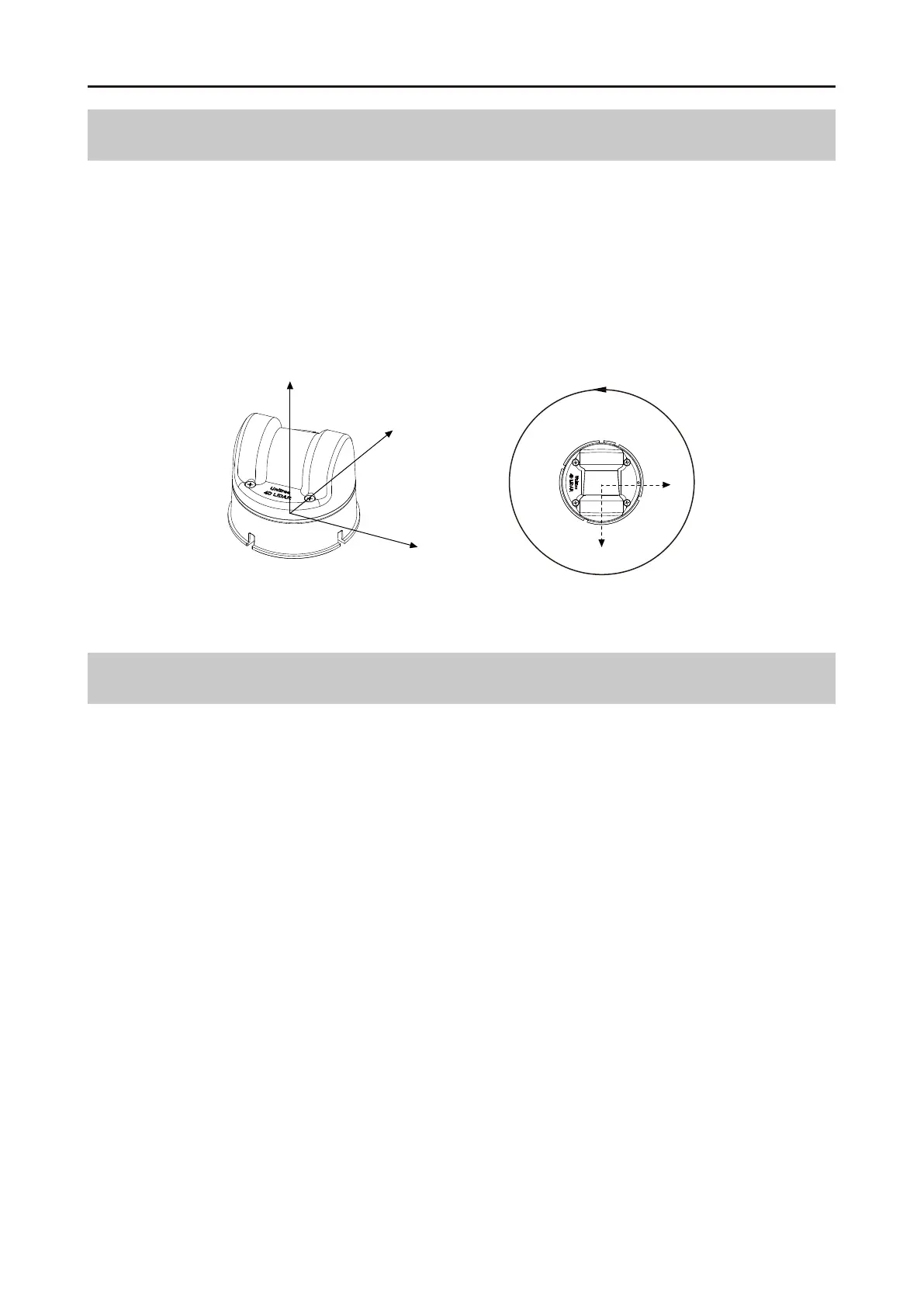
Coordinate System
The definition of the right - angled coordinate system O - XYZ of L2 is as shown in the following
figure. O is the origin of the point cloud coordinate system, located at the bottom center position, +X
is the opposite direction of the outlet, +Y is the direction 90 ° counterclockwise from +X, and O - XYZ
is the point cloud coordinate system of L2 (the origin and XYZ coordinate system of the IMU are
seen in the L2 3D model, and its XYZ axes are relatively parallel to the XYZ axes of the point cloud
coordinate system).
Unitree4D LiDAR – L2 Coordinate Definition
O
Z
X
Y
360°
X
Y