Working Principle
The L2 radar mainly includes a laser emission and ranging core, a reflecting mirror, a high - speed
rotating motor, and a low - speed rotating motor. In the working state, according to the illustrated
perspective, the rotation directions of the high - speed rotating motor and the low - speed rotating
motor are as follows.
The L2 communication supports ENET UDP and TTL UART. When using ENET UDP communication,
connect the L2 network port and power port. When using TTL UART, it can be connected through
the provided adapter module, connect the Type - C port in the adapter module and the power port
in the cable, or it can also directly connect to the TTL UART serial port socket according to the wire
sequence in the "Interface Definition" to use. The L2 is equipped with an adapter module, a power
adapter and a data cable for users, eliminating the need to provide a complex power supply system
and debugging cables, reducing the use cost.
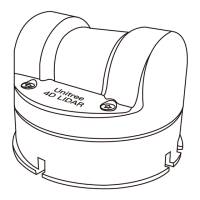
The L2 adopts the laser flight time ranging technique and, in cooperation with a high - speed laser
acquisition and processing mechanism, can achieve 64,000 ranging actions per second. For each
ranging action, the L2 emits an infrared laser signal in the form of a narrow pulse at the ns level.
The light reflected after this laser signal irradiates the target object will be received by the laser
acquisition system of the radar. After being analyzed and processed by the processor, the distance
value between the target object irradiated and the L2 as well as the current included angle and
other information will be output from the communication interface.
2024 Unitree Robotics. All rights reserved.
3
Unitree4D LiDAR-L2 User Manual
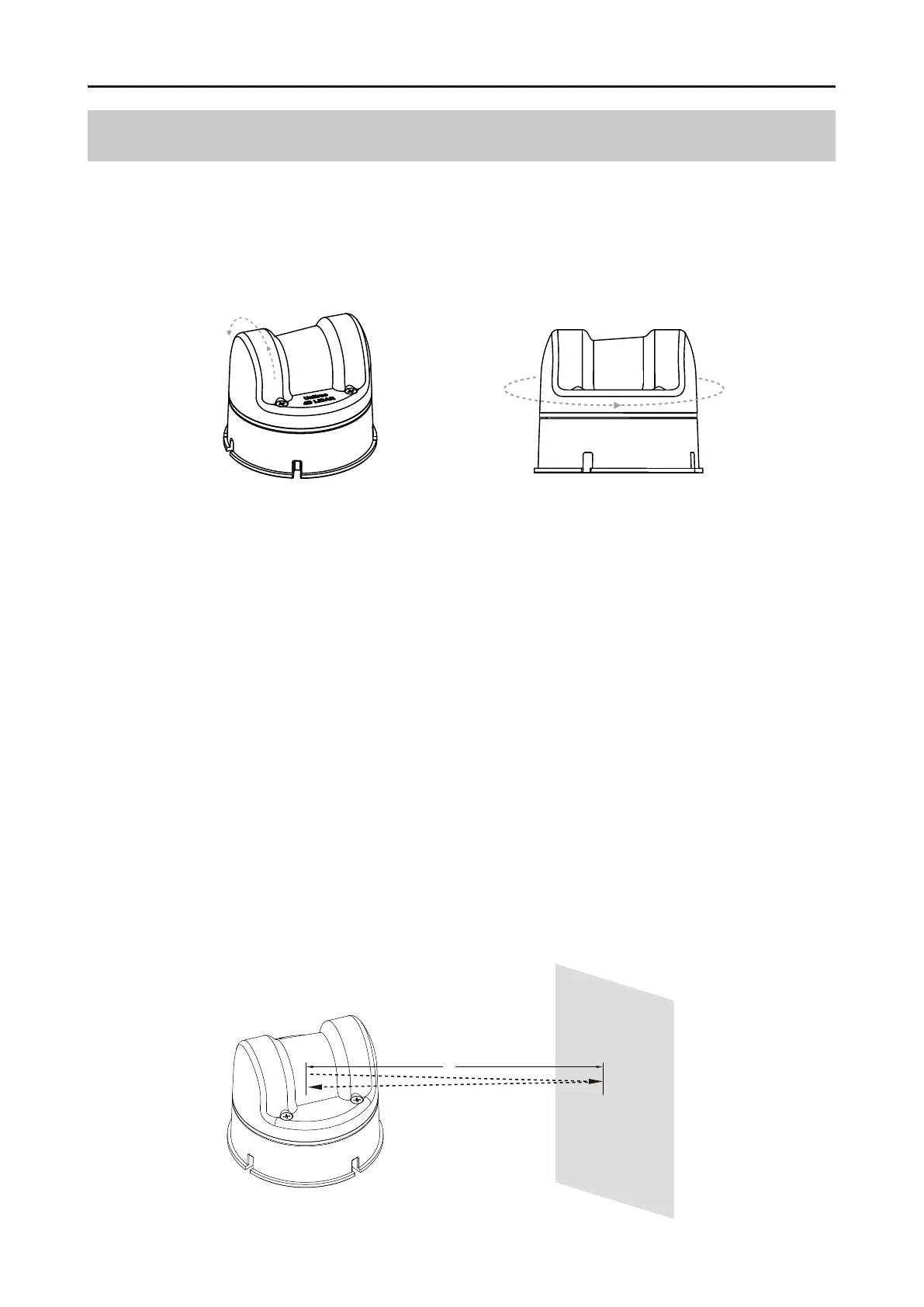
Working Principle Schematic Diagram
High-speed motor rotation direction Low speed motor rotation direction
d