MANDATORY ACTION
Before continuing, read the complete guide in this manual.
2. Move the robot to an appropriate position for disassembly.
3. Shut down the Control Box and remove the main power.
4. If necessary, dismount the entire Robot Arm from the work cell and place on a solid surface.
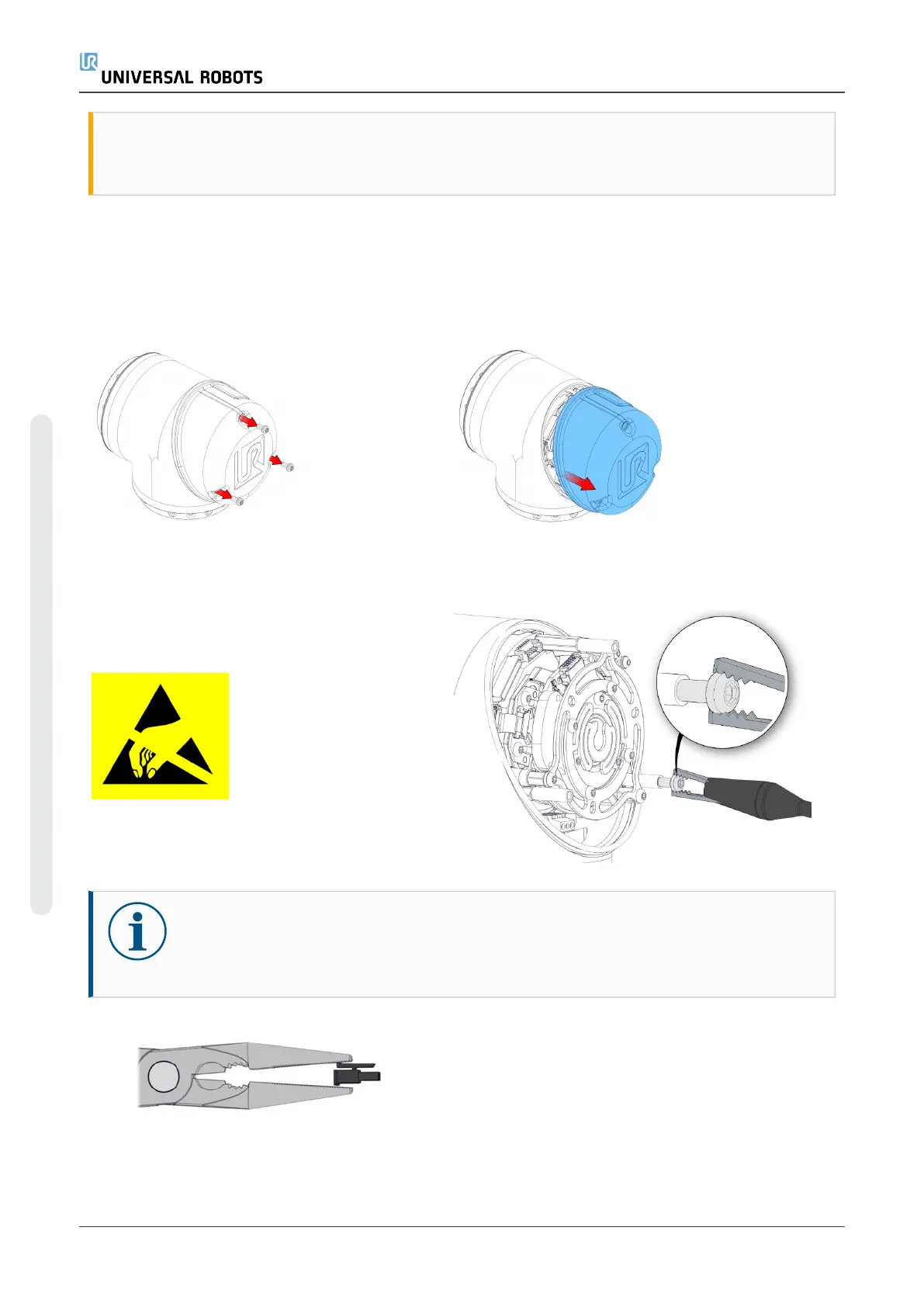
5. Remove screws and the blue lid.
6. Now reattach one of the screws, on one of the standoffs and mount the alligator clip on your
ESD wristband, as shown below.
NOTICE
Some connectors have a lock that must be engaged before it is pulled out of the
printed circuit board.
7. Gently unplug the cable connectors without bending the printed circuit board.
e-Series 22 Service Manual
4.Service and Replacement of Parts
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










