上海维宏电子科技股份有限公司
Weihong Electronic Technology Co., Ltd.
Specialized, Concentrated, Focused - 63 -
5.1.1 Principle of Returning to Machine Origin (without Encoder
Feedback)
The sketch map of returning to machine origin with servo motor is as below (without encoder
feedback):
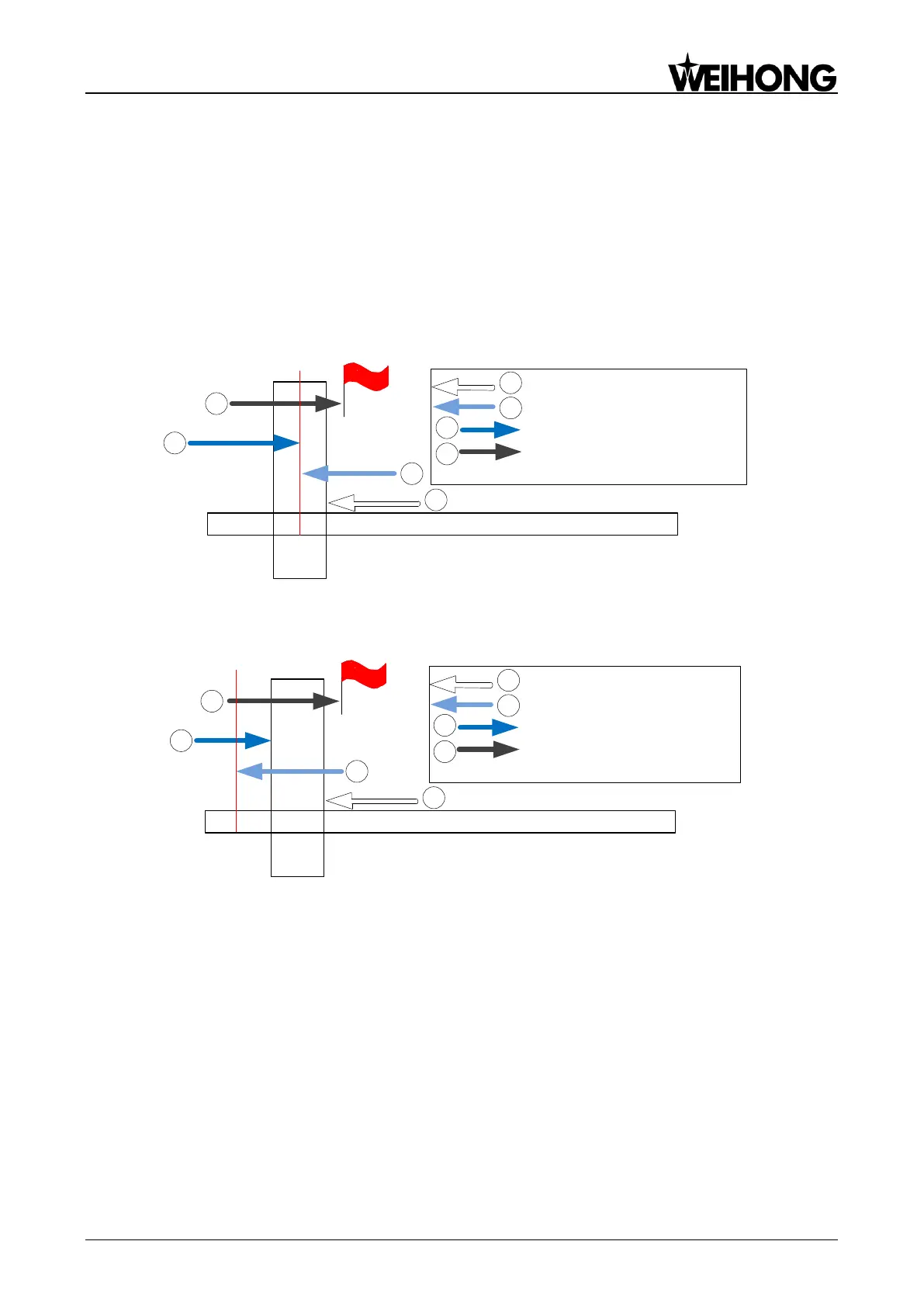
Coarse Positioning Stage
AB
C’
C
D
4
3
2
1
Distance
Legend:
2
Stop position after receiving signal
3
Enter into signal zone reversely
4
Leave signal zone reversely
Arrow tip indicates the machine stop position
1
Initial stage
Coarse Positioning Signal Belt
Fig. 5-1 Sketch map of coarse positioning (stopping within the signal belt after receiving REF. point signal)
Coarse Positioning Signal Belt
C’
C
D
AB
4
3
2
1
Distance
Legend:
2
Stop position after receiving signal
3
Enter into signal zone reversely
4
Leave signal zone reversely
Arrow tip indicates machine stop position
1
Initial stage
Fig. 5-2 Sketch map of coarse positioning (stopping out of the signal belt after receiving REF. point signal)
1) When the machine keeps moving until receiving REF. point signal at place A, it should stop
immediately, but it may stop at place C or C‘ due to time lag and inertia.
2) The machine keeps moving reversely at one third of ―Home Search Velocity‖ until receiving REF.
point signal (if the machine has stayed in the signal belt in the above step 1, it will make no motion in
this step).
3) The machine keeps moving reversely at one-tenth of ―Home Search Velocity‖ until the REF. point
signal disappears (across the signal belt).