上海维宏电子科技股份有限公司
SHANGHAI WEIHONG ELECTRONIC TECHNOLOGY CO., LTD.
12 / 116
o Description: The number of command pulses for the motor to rotate by one
turn
o Unit: -
o Range
0: Pr009 and Pr010 are effective
Not 0: Pr008 = Screw pitch/(pulse equivalent * mechanical
reduction ratio)
o Value: 0
Pr009 1st command division and multiplication (numerator), Pr010 Command
division and multiplication (denominator)
o Description: Pay attention to the ratio between Pr009 and Pr010.
o Unit: -
o Range: 0–2
30
o Value: If screw pitch = 5 mm, encoder resolution = 10000, directly connected
to the coupler, pulse equivalent = 0.001 mm: Pr009 = 10000, Pr010=screw
pitch / pulse equivalent=5000, which means Pr009/Pr010 = 10000/5000=2/1.
Pr011 Number of pulses output by one motor turn
o Description: Number of pulses output by one motor turn
o Unit: -
o Range: -
o value: If pulse equivalent = 0.001, there is no speed reducer, screw pitch =
10 mm: Pr011=2500; if screw pitch = 5 mm: Pr011 = 1250
Pr100 1st position loop gain
o Description: 1st position loop gain
o Unit: 0.1/s
o Range: -
o Value: 480 (default) or subject to actual situation.
Pr101 1st velocity loop gain
o Description: 1st velocity loop gain
o Unit: 0.1 Hz
o Range: -
o Value: 270 (default) or subject to actual situation.
Pr102 1st velocity loop integral time constant
o Description:1st velocity loop integral time constant
o Unit: 0.1 ms
o Range: -
o Value: 210 (default) or subject to actual situation.
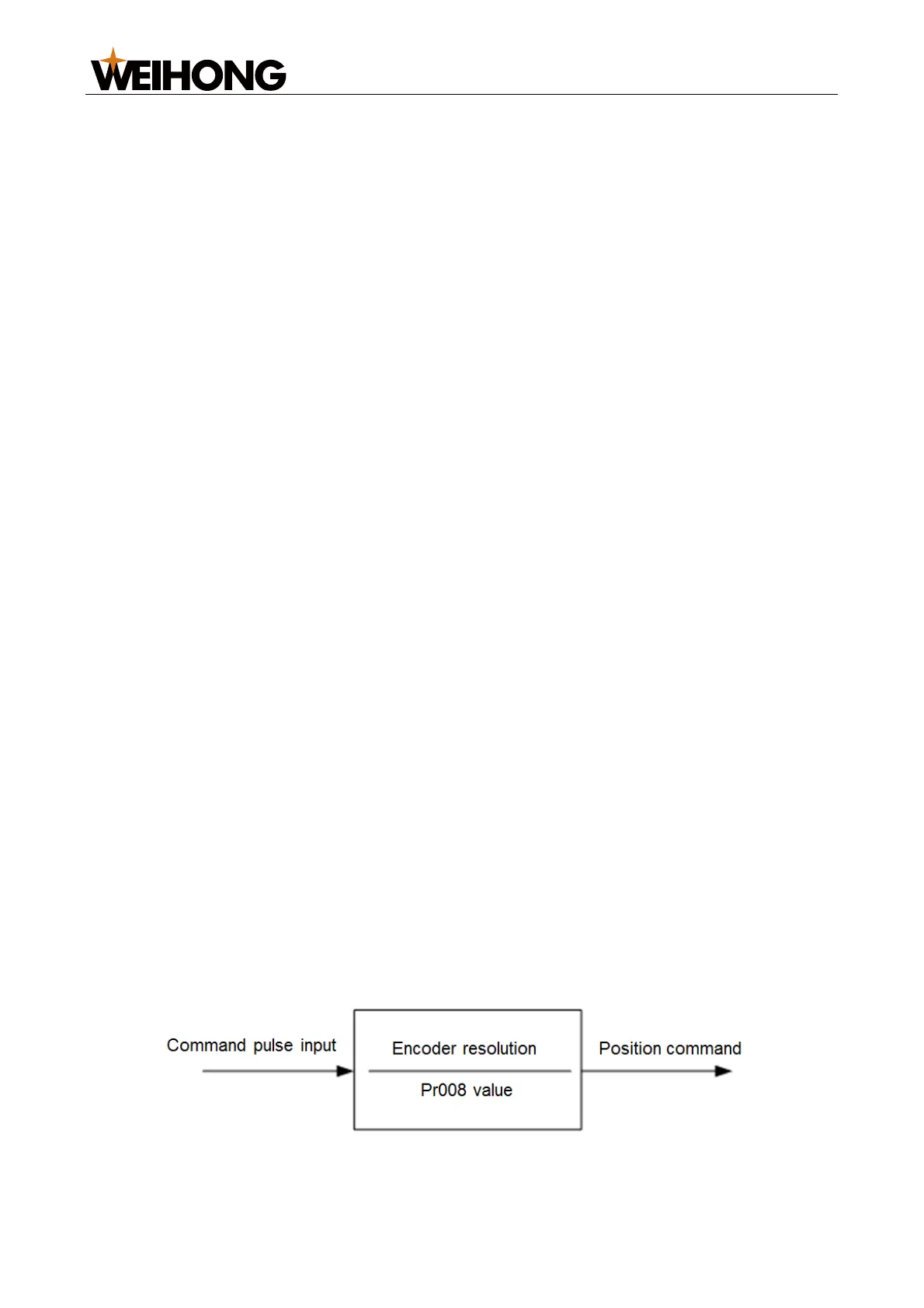
Relationship between Pr008, Pr009, and Pr010
Pr009 and Pr010 values are not valid. System processing is based on the Pr008
value.
If Pr008 and Pr009 are 0, system processing is based on the Pr010 value.
 Loading...
Loading...

