WLKATA Mirobot Manipulator User Manual
Document version 1.0 User Manual Copyright© Beijing Tsinew Technologies Co., Ltd.
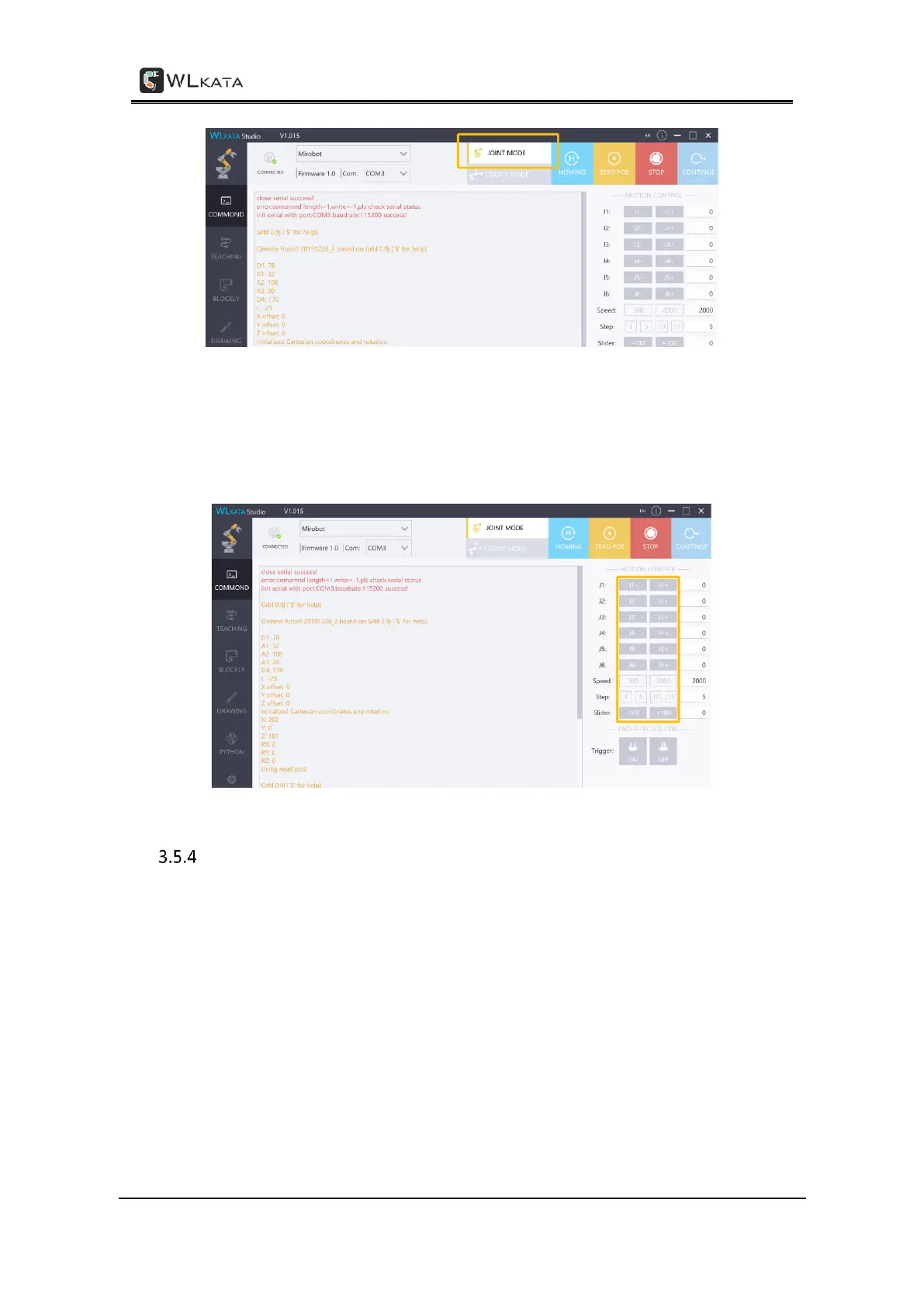
Selecting the ROBOT JOINT MODE
STEP (3) Click each of the J+ J- control buttons on the right panel to control the motion of
each of the six joints of the manipulator separately. The speed can be adjusted by input
Speed value, and the step can be adjusted by input Step value.
The ROBOT JOINT MODE control panel
Using the COORDINATE MODE control function
STEP (1) Click the COMMAND tab.
STEP (2) Switch to COORDINATE MODE in the control modes selection panel.