WLKATA Mirobot Manipulator User Manual
Document version 1.0 User Manual Copyright© Beijing Tsinew Technologies Co., Ltd.
4 Working principle and specification
This chapter describes the working space, working principle, size and key technical
specifications of WLKATA Mirobot .
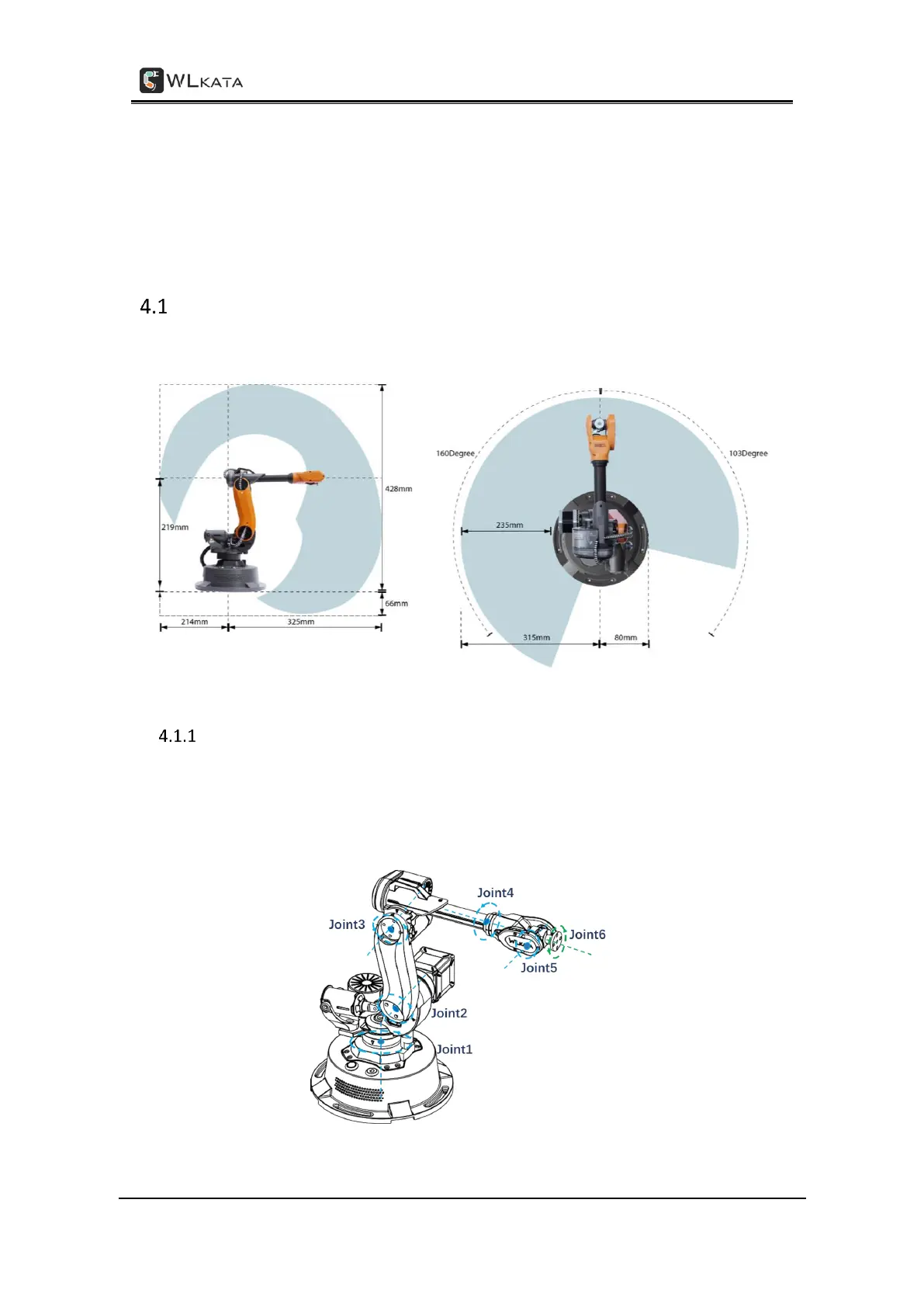
Working space
The workspace of WLKATA Mirobot.
Coordinate system
WLKATA Mirbot has a six-joint coordinate system and a Cartesian space coordinate
system.
Six-joint coordinate system Of WLKATA Mirobot