WLKATA Mirobot Manipulator User Manual
Document version 1.0 User Manual Copyright© Beijing Tsinew Technologies Co., Ltd.
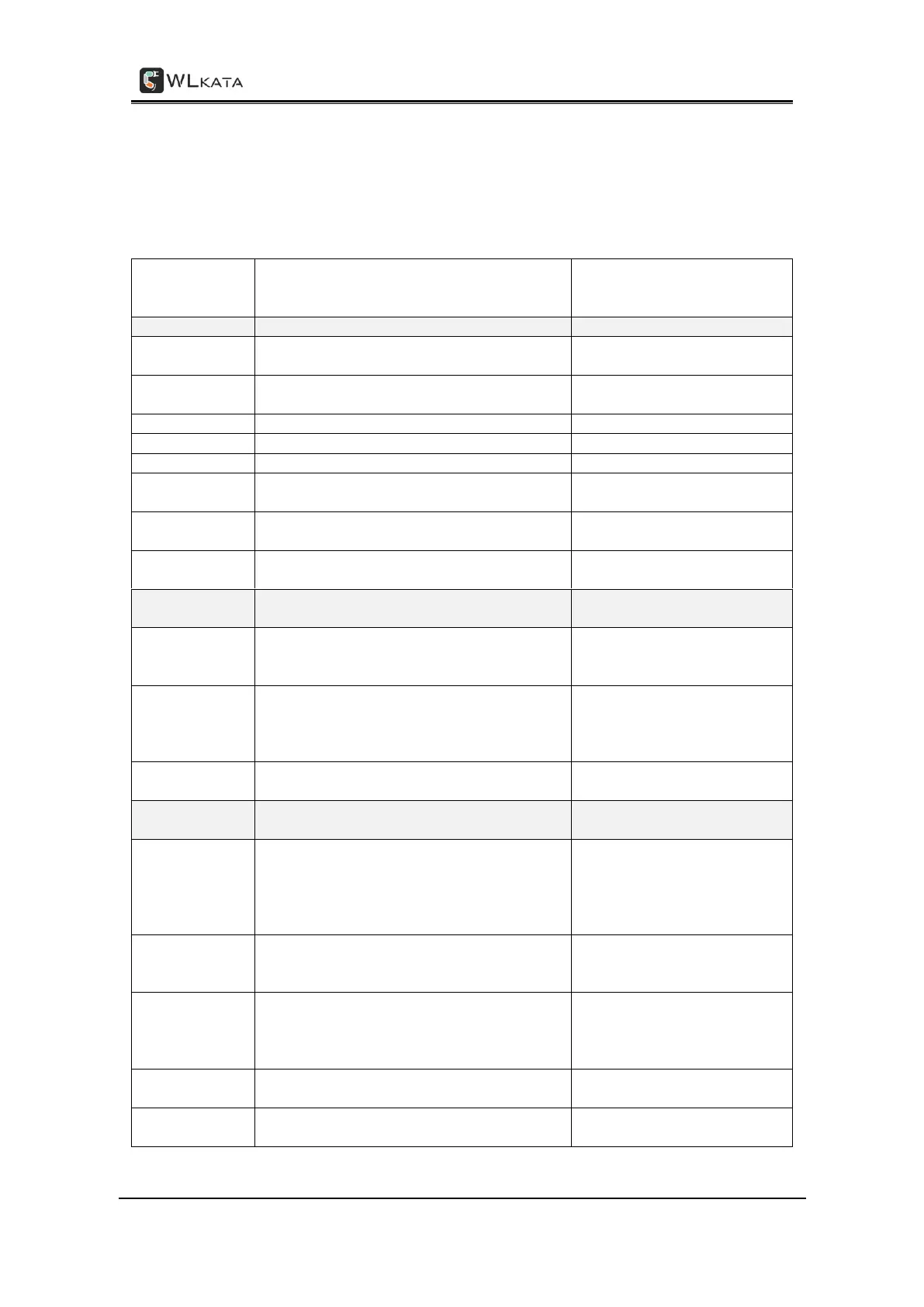
options and Coordinate control options. Double click the Quick command and the code will be
inserted into the command line.
The list of Quick command and description is as below:
Perform the homing routine on
all axis at the same time.
Unlock the shaft enabling
movement.
Send each axis to its 0 position.
Switch on the suction cup.
Switch off the suction cup.
api.slider_move_to(x, speed)
Move the slide rail to the
specified position.
api.conveyor_move_to(ConveyorMode.relative,
0, 1500)
Move the slide rail to the
specified position
Delay the next action after the
specified time
api.go_to_axis(0,0,0,0,0,0,1500)
Mirobot moves from the
current position to the specified
position in the angle mode.
api.increment_axis(0,0,0,0,0,0,1500)
Mirobot moves from the
current position to the specified
position
api.move_to_axis(MirobotJoint.Joint1,
RevolveDirection.cw, 0, 1500)
Rotate specify axis the specified
value in the specified direction
Coordinate
control options
api.go_to_cartesian_lin(202,0,181,0,0,0,1500)
Mirobot moves from the
current position to the specified
position in the coordinate
mode.
The increment
in Cartesian
space
api.increment_cartesian_lin(0,0,0,0,0,0,1500)
Mirobot moves specified
number of coordinates in
specified direction.
api.direction_mobility(MoveDirection.forward,
0, 1500)
Mirobot moves specified
coordinates independently from
the current position in the
specified direction
api.jump_move(ConveyorMode.relative, 0, 0, 0,
1500)
Jump move to the specified
position.
api.set_arc_move(MoveMode.relative,
RevolveDirection.cw, 0, 0, 0, 60, 1500)