P5-47 alarm output /ALM Output alarm function through the setting of SO terminal,
the SO2 terminal outputs dynamic closing signal by default
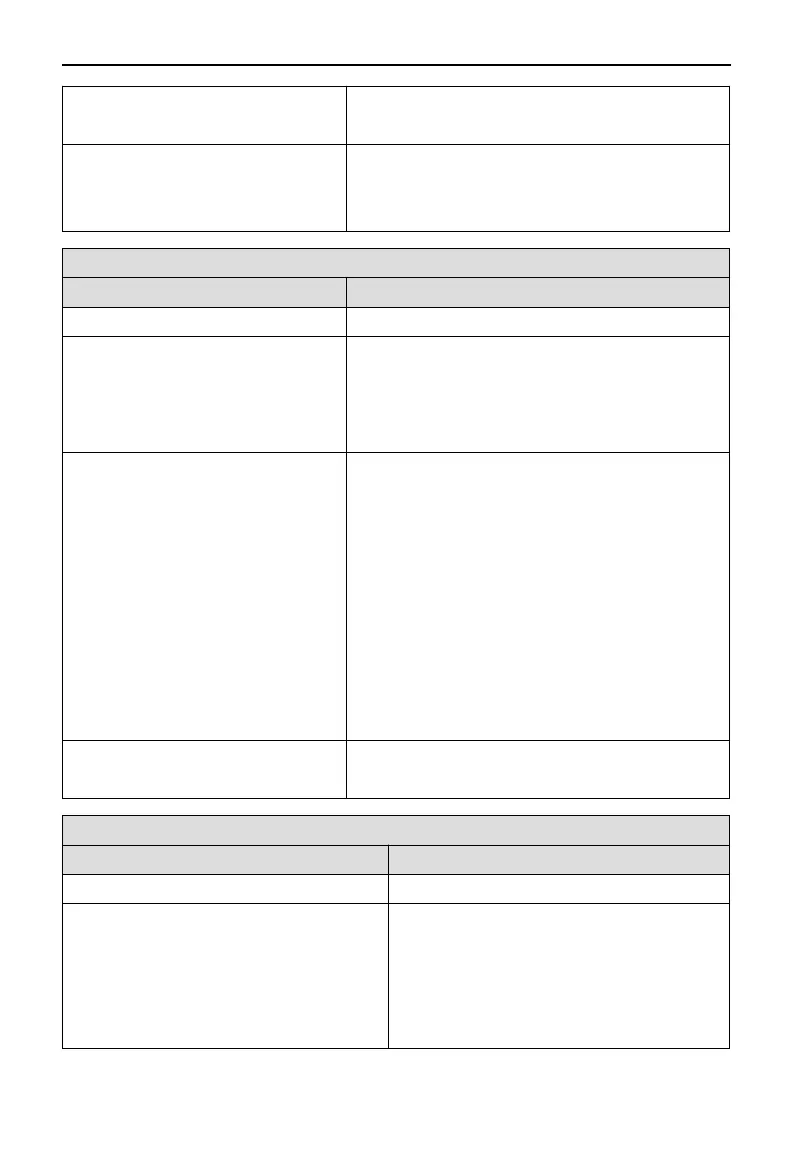
P7-00 RS485 station no.
P7-01 communication setting
P7-02 RS485 communication protocol
Communication setting related parameters
Common parameters of external pulse position mode
Parameter Essentials
P0-01 control mode selection Set to 6: external pulse mode
P0-10 pulse command form Set pulse form
0-CW/CCW
1-AB
2-P+D
P0-11 set the number of pulses per motor
revolution * 1
P0-12 set the number of pulses per motor
revolution * 10000
P0-13 electronic gear ratio (numerator)
P0-14 electronic gear ratio (denominator)
P0-92 ~ P0-93 32-bit electronic gear ratio
numerator
P0-94 ~ P0-95 denominator of 32-bit
electronic gear ratio
Set the number of command pulses required for one
revolution of the motor
P0-13 / P0-14 takes effect when P0-11 / P0-12 are all zero
When P0-11 ~ P0-14 are all zero, P0-92 ~ P0-95 are
effective
32-bit gear ratio numerator: P0-92 * 1 + P0-93 * 10000
Denominator of 32-bit gear ratio: P0-94 * 1 + P0-95 *
10000
P0-09 pulse command setting You can set the low-speed pulse command direction and
low-speed pulse filtering time respectively
Common parameters of internal position mode
Parameter Essentials
P0-01 control mode selection Set to 5: internal position mode
P4-03 internal position setting mode
P4-04 number of valid segments
P4-10 ~ P4-254 position parameter setting of
internal sections 1 to 35
Control mode setting of internal position mode:
including step change mode, positioning mode and
adjustment time
Configuration of pulse displacement, speed,
acceleration and deceleration time at each section
120
 Loading...
Loading...

