7.Servo parameter list
7-1.Control parameter list
Modification and effective:
“○” means modifying when servo OFF and take effect at once.
“√” means modifying anytime and take effect at once.
“●” means modifying when servo OFF and take effect when power on again.
“△” means modifying anytime and take effect when the motor doesn’t rotate.
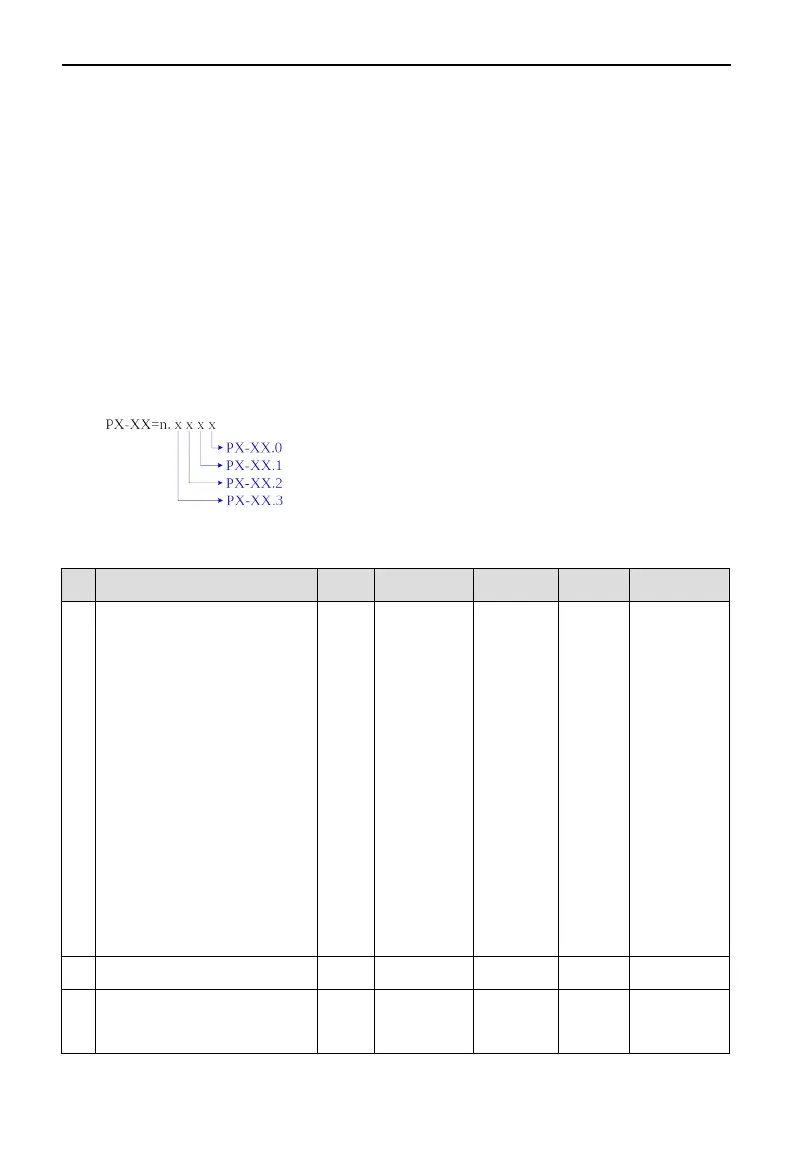
For parameters set in hexadecimal system, the prefix "n." is added to the setting value to indicate that the
current setting value is hexadecimal number.
Composition of parameters:
P0-XX:
P0- Function Unit Default value Range Effective Suitable mode
01
Control mode 1
1-Internal Torque Mode
2-External Analog Torque Mode
3-Internal speed Model
4-External Analog speed Mode
5-Internal Location Mode
6-External Pulse Position Mode
7-External Pulse speed Mode
8-XNET Bus Torque Mode
9-XNET Bus Speed Mode
10-XNET Bus Location Mode
- 6 1~10 ○ 1|3|5|6|7|8|9|10
02 Control mode 2 (ditto) - 6 1~10 ○ 1|3|5|6|7|8|9|10
03 Enabling mode
0-not enabled
- 1 0~3 ○ 1|3|5|6|7|8|9|10
90
 Loading...
Loading...

