1-IO enable
2-Software Enablation
3-XNET Bus Enablation
04 Rigidity grade -
20P1~20P7:15
>=21P5:10
0~63 △ 1|3|5|6|7|8|9|10
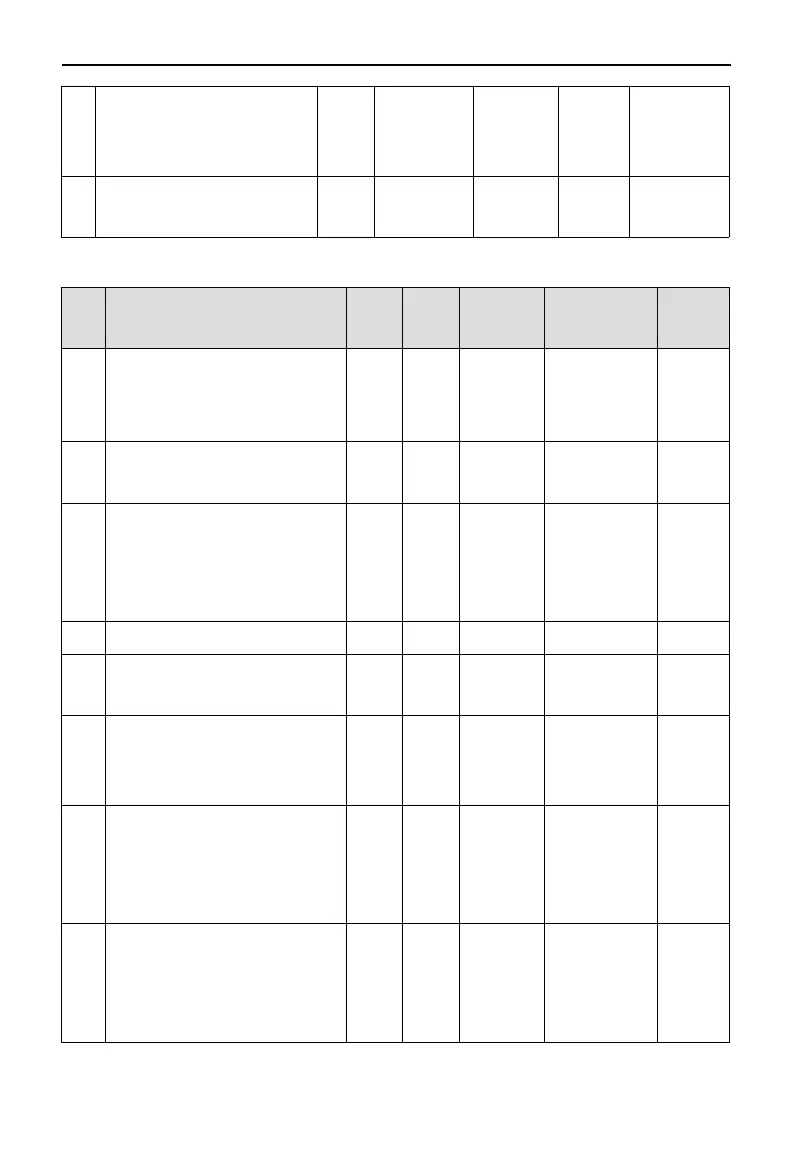
P0- Function Unit
Default
value
Range Effective
Suitable
mode
05
Definition of rotation direction
0- positive mode
1- negative mode
- 0 0~1 ●
1|3|5|6|7|8|
9|10
07 First inertia ratio 1% 500 0~50000 √
1|3|5|6|7|8|
9|10
09.0
Forward Direction of Input Pulse
Instruction
0-Forward Pulse Counting
1-Reverse Pulse Counting
- 0 0~1 ● 6|7
09.2 Input pulse command filter time - F 0~F ● 6|7
09.3
Predistribution of input pulse
command filter
- 0 0~7 ● 6|7
10.0
0-CW/CCW
1-AB
2-P+D
- 2 0~2 ○ 6|7
11
~
12
Number of instruction pulses per cycle
0: Electronic gear ratio
Non-0: Number of command pulses
required for motor rotation
1 pul 10000 0~99999999 ○ 5|6
13 Electronic Gear Numerator - 1 0~65535
○(before
3770)
√
(
3770 and after
only valid in mode
5|6
91
 Loading...
Loading...

