No need to connect
external input
SI□ terminal has signal
input
SI□ terminal has no signal
input
Parameter settings in forward limit signal /POT and reverse limit signal /NOT can not be set to the
same terminal input at the same time.
POT, set the servo overrun stop mode as P0-28
NOT, set the servo overrun stop mode as P0-28
The deceleration stops 1, the overrun direction moment is 0 after
stopping, and receiving instructions.
Inertia stops, after stopping, overrun direction moment is 0,
receiving instructions.
The deceleration stops 2, after stopping, the overrun direction does
not receive instructions.
Note:
(1) When P0-28 = 0/2, the motor starts to decelerate and stop after receiving the overtravel stop
signal, and the braking torque is P3-32 when decelerating stop, and the stop timeout also plays a role in
the overtravel process.
(2) During position control, when the motor is stopped by over travel signal, there may be position
deviation pulse. To clear the position deviation pulse, the clear signal /CLR must be input. If the servo
unit still receives pulses, they will accumulate until the servo unit gives an alarm.
(3) During torque control, the SO terminal of servo drive has the function of holding brake, which
can't be distributed through the overtravel signal terminals P5-22 and P5-23.
(4) Servo driver SO terminal is assigned with holding brake function, P0-28 is automatically set to
2.
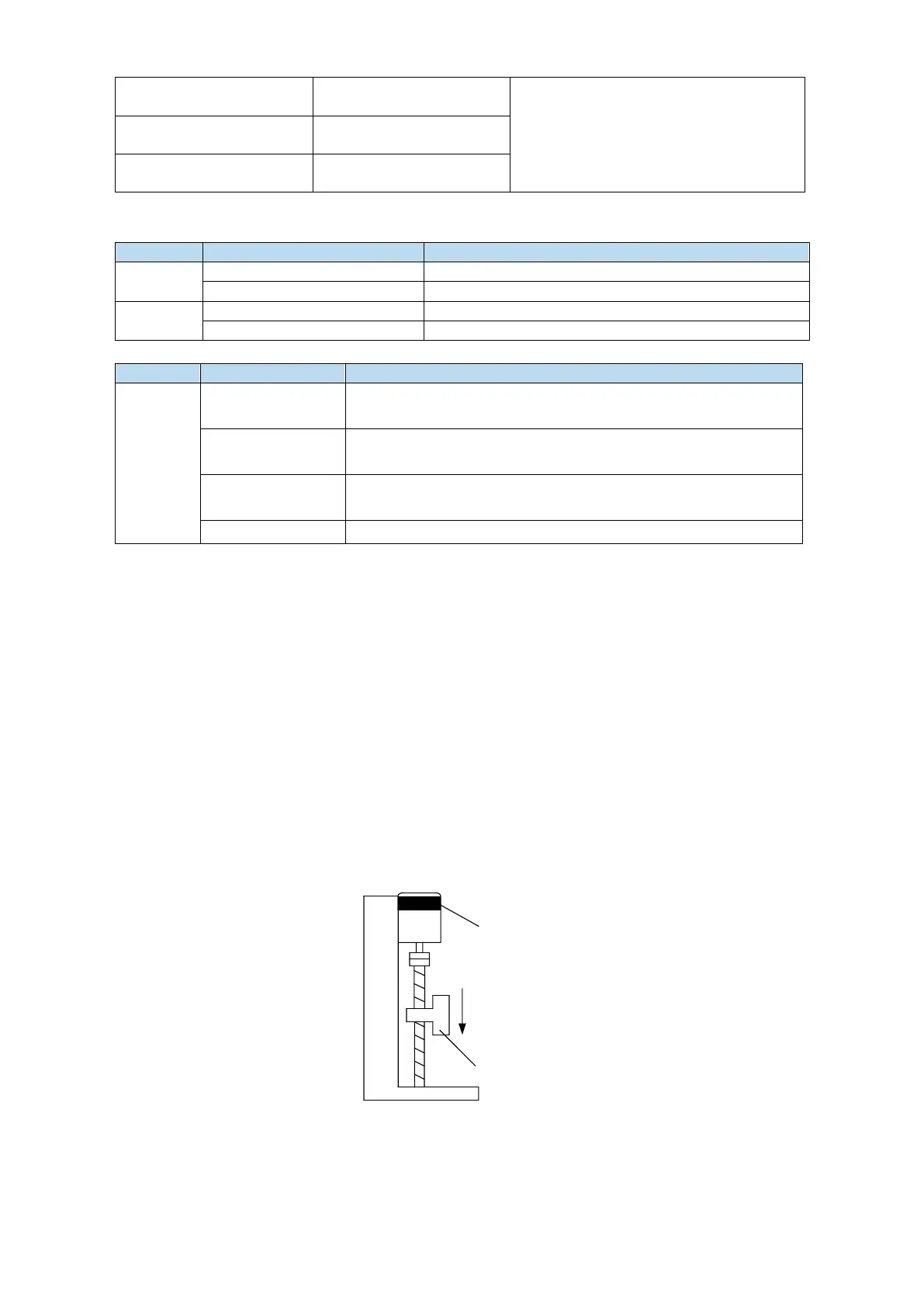
5.2.5 Power-off brake
When the servo motor controls the vertical load, the purpose of using the “brake servo motor” is:
when the power supply of the system is placed in the "OFF", the movable part will not move under the
action of gravity.
Electric loss
brake
Prevent from
falling due to
self-weight
when power
supply OFF
Mechanical
Motion part
Note: The brake built in the servo motor is a fixed special brake without excitation. It can not be used
for dynamic braking. Please use it only when the servo motor is in a stop state.
 Loading...
Loading...


