D 6.4 CONFIGURATION OF INPUT/OUTPUT NOTE
CIRCUITS When the overtravel prevention circuit is not used,
connect 1CN-_ and @ to the OV terminal of the
external 24V power supply.
For proportional drive, overtravel, servoON, servo
alarm output, current limit detection output and TG (3) Servo ON [S-ON]
ON output, each input/output circuit is a non-contact
circuit insulated with optical couplers. The external .This circuit is used to turn ON the main-circuit power-
circuit, therefore, must be constructed with the speci- drive circuit of the SERVOPACK. When the signal of
fied voltage and current, the circuit is not input (Servo OFF status),the motor
cannot be driven. If this signal is applied during motor
6.4.1 Input Circuit running, the motor will coast to a stop. Never stop
the motor using Servo OFF except in emergency during
There are four types of protective functions to prevent motor running.
continued rotation of the motor in forward, and re-
verse direction: Servo ON, proportional drive, and NOTE
overtravel prevention (forward and reverse). Construct Before turning power ON or OFF, turn OFF the
the input circuit using 24V power supply (Fig. 6.8). "Servo-ON" switch to avoid troubles resulting
D Typical circuits are shown in Fig. 5.3. from transient current.
6.4.2 Output Circuit
NOTE. There are six output signals: Current limit detection,
TG ON, Servo alarm, Servo ready, MCCB trip and OL
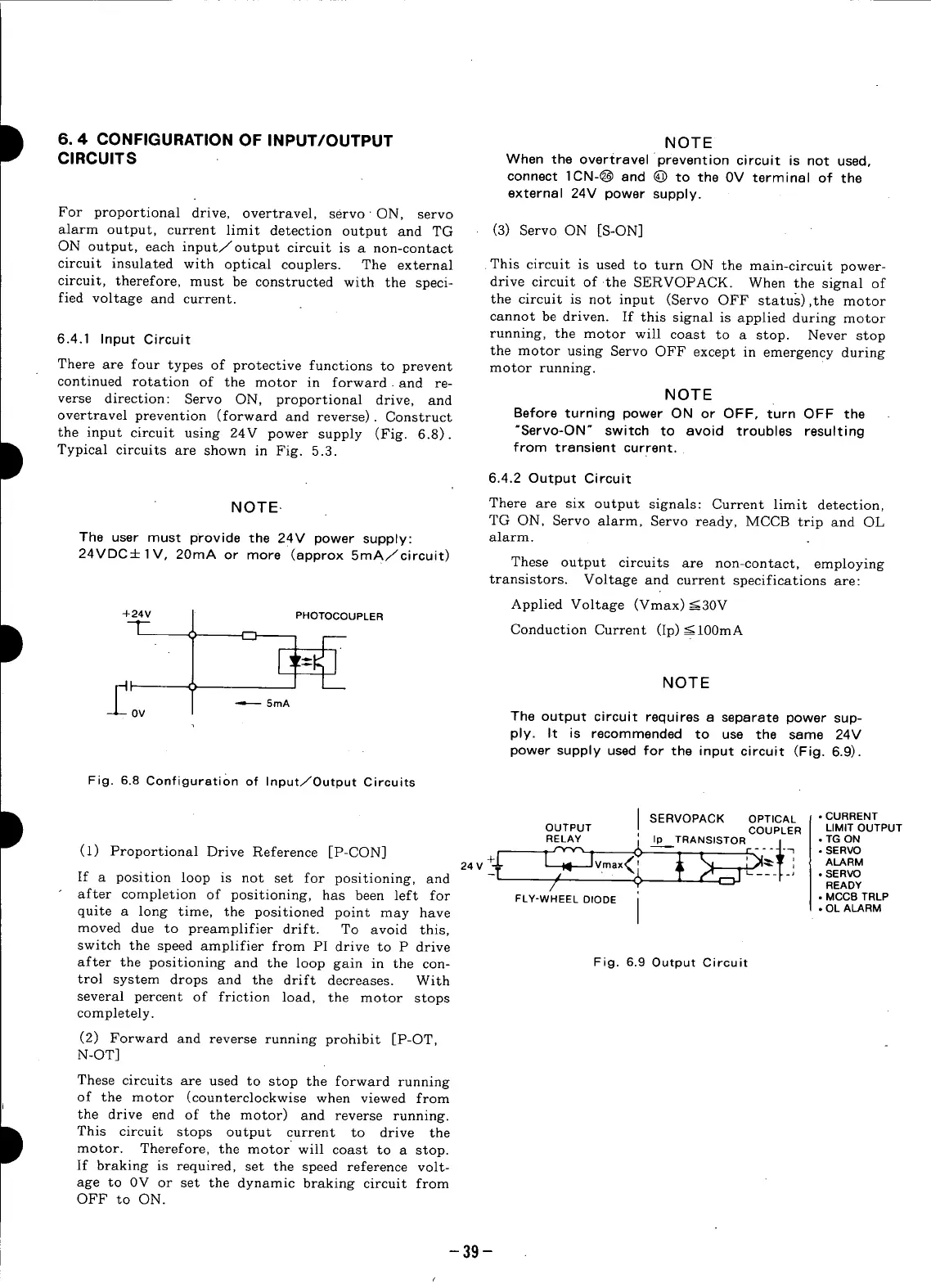
The user must provide the 24V power supply: alarm.
24VDC+lV, 20mA or more (approx 5mA/circuit) These output circuits are non-contact, employing
transistors. Voltage and current specifications are:
Applied Voltage (Vmax) <30V
+24V l PHOTOCOUPLER
D t I r-_ _ ConductionCurrent(Ip)__iOOma
__1 NOTE
-.m---- 5rnA
0v
The output circuit requires a separate power sup-
ply. It is recommended to use the same 24V
power supply used for the input circuit (Fig. 6.9).
Fig. 6.8 Configuration of Input/Output Circuits
D I SERVOPACK OPTICAL • CURRENT
OUTPUT , COUPLER LIMIT OUTPUT
RELAY _ _ Ip TRANSISTOR 1 • TG ON
- - .SERVO
(1) Proportional Drive Reference [P-CON] 24 V 4 _ IVrnax<'. _ + _-_-_-_ " SERvoALARM
If a position loop is not set for positioning, and / T READY
after completion of positioning, has been left for FLY-WHEELDIODE .MCCBTRLP
quite a long time, the positioned point may have .OLALARM
moved due to preamplifier drift. To avoid this,
switch the speed amplifier from PI drive to P drive
after the positioning and the loop gain in the con- Fig. 6.9 Output Circuit
trol system drops and the drift decreases. With
several percent of friction load, the motor stops
completely.
(2) Forward and reverse running prohibit [P-©T,
N-OT]
These circuits are used to stop the forward running
of the motor (counterclockwise when viewed from
the drive end of the motor) and reverse running.
D This circuit stops output current to drive the
motor. Therefore, the motor • will coast to a stop.
If braking is required, set the speed reference volt-
age to 0V or set the dynamic braking circuit from
OFF to ON.
I -39-