Programming 88
Function: During Run 1
Setting: 0
A During Run 1 output will close whenever the Run command is provided and the Drive is outputting voltage.
This includes deceleration and DC Injection.
Function: Zero Speed
Setting: 1
The “Zero Speed” output will close whenever the output frequency falls below the Minimum Frequency (E1-09).
Function: Fref/Fout Agree 1
Setting: 2
The “Fref/Fout Agree 1” output will close whenever the actual output frequency is within the Speed Agree Width (L4-02) of
the current frequency reference regardless of the direction.
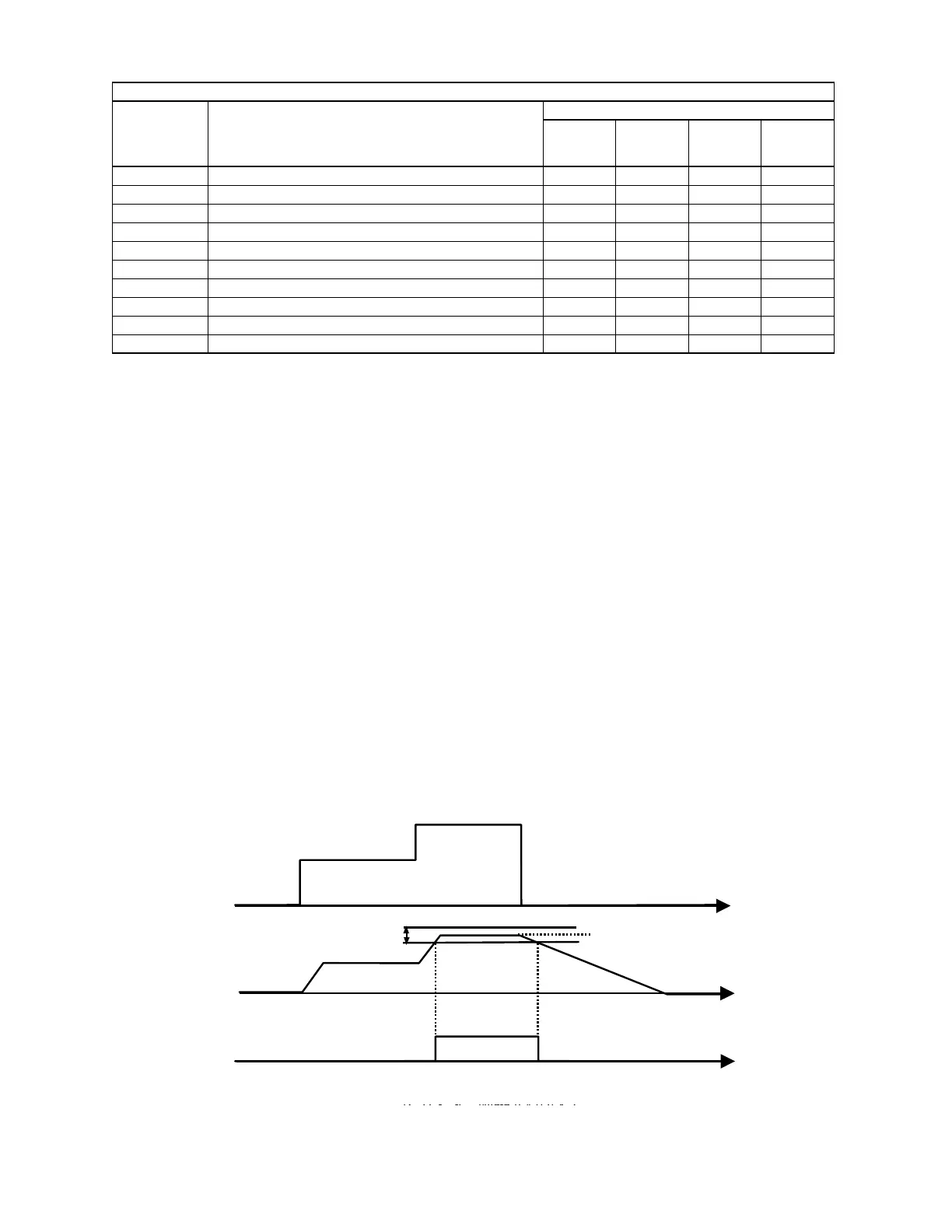
Function: Fref/Set Agree 1
Setting: 3
The “Fref/Set Agree 1” output will close whenever the actual output frequency and the frequency reference are within the
Speed Agree Width (L4-02) of the programmed Speed Agree Level (L4-01).
Fig. 56 Fref/Set Agree 1 Timing Diagram
1D Regenerating X X X O
1E Restart Enabled O O O O
1FOverload (OL1) OOOO
20 OH Alarm O O O O
30 During Torque Limit (when in speed control) X X O O
31During Speed Limit XXXO
32 During Speed Limit (when in torque control) X X X O
33 Zero Servo Complete X X X O
37 During Run 2 O O O O
38 Drive Enable O O O O
Table 18 Digital Output Functions (Continued)
Parameter
Setting
Function
Control Method (A1-02)
V/f
V/f with
PG
Open
Loop
Vector
Flux
Vector
Frequency Agree
Signal
Output Frequency
t
a
Frequency
a
D t ti Width (L4 02) X 2
Speed Agree Level
(L4-01)
t
t
frequency reference
Frequency/Set Agree 1
Signal
a - Speed Agree Width (L4-02) X2
ON (CLOSED)
OFF (OPEN)
TIME
 Loading...
Loading...




