Programming 87
H2 Digital Outputs
H2-01 Terminal M1-M2 Function Selection
H2-02 Terminal M3-M4 Function Selection
H2-03 Terminal M5-M6 Function Selection
Setting Range: 0 to 38
Factory Default: H2-01 = “0: During Run 1”
H2-02 = “1: Zero Speed”
H2-03 = “2: Fref/Set Agree 1”
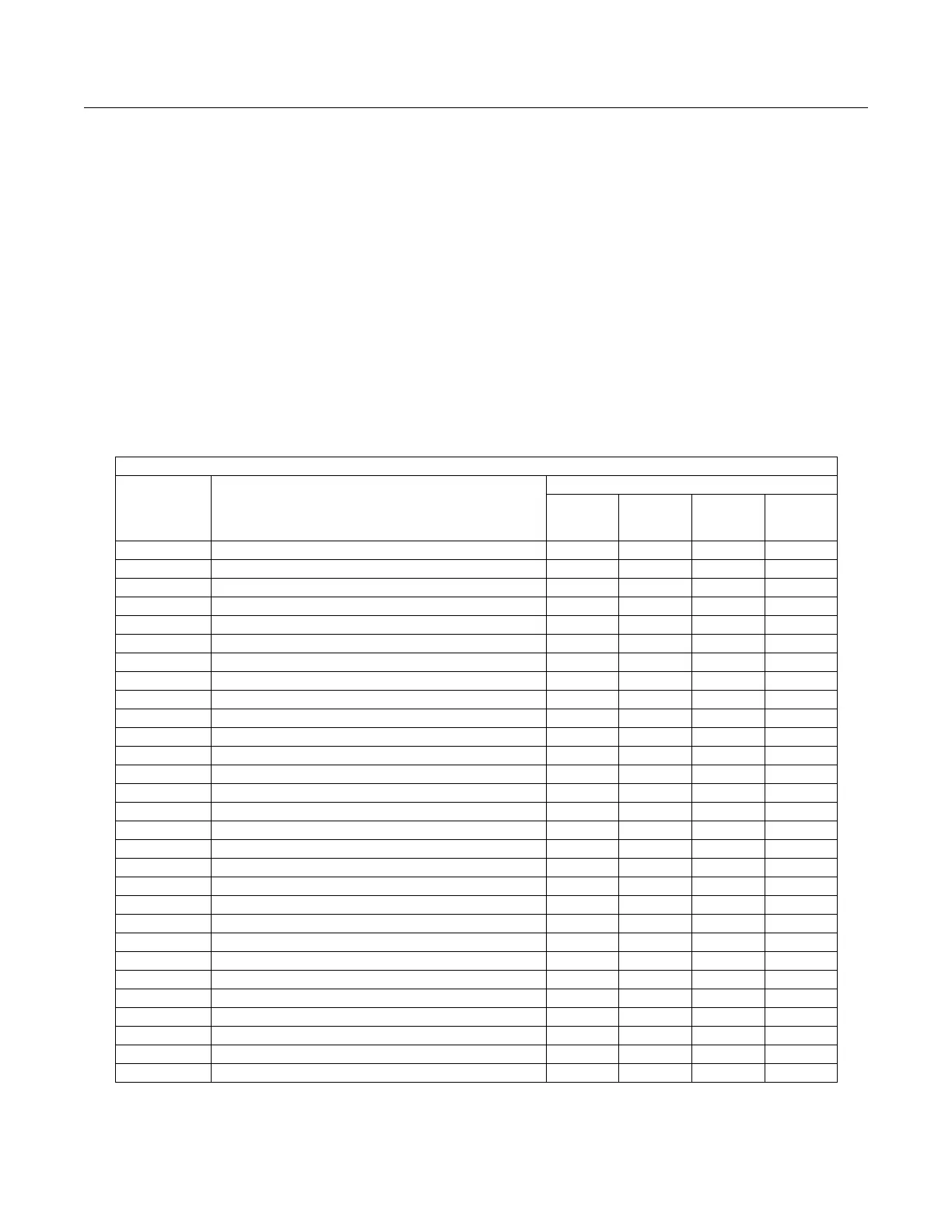
The Drive has two multi-function outputs. By programming parameters H2-01 and H2-02, the user can assign specific
functions to each output. Below is a table with a complete list of all of the digital output functions. Following the table is a
more detailed description of each of the functions.
Table 18 Digital Output Functions
Parameter
Setting
Function
Control Method (A1-02)
V/f
V/f with
PG
Open
Loop
Vector
Flux
Vector
0 During Run 1 (factory default, H2-01) OOOO
1 Zero Speed (factory default, H2-02) OOOO
2 Fref/Fout Agree 1 (factory default, H2-03) OOOO
3 Fref/Set Agree 1 O O O O
4 Frequency Detection 1 O O O O
5 Frequency Detection 2 O O O O
6 Inverter Ready O O O O
7 DC Bus Undervoltage O O O O
8 Base Block 1 N.O. O O O O
9 Operator Reference O O O O
A Local/Remote Operation O O O O
B Torque Detection 1 N.O. O O O O
C Loss of Reference O O O O
D Braking Resistor Fault O O O O
EFault OOOO
FNot Used OOOO
10Alarm OOOO
11 Reset Command Active O O O O
12 Timer Output O O O O
13 Fref/Fout Agree 2 O O O O
14 Fref/Set Agree 2 O O O O
15 Frequency Detection 3 O O O O
16 Frequency Detection 4 O O O O
17 Torque Detection 1 N.C. O O O O
18 Torque Detection 2 N.O. O O O O
19 Torque Detection 2 N.C. O O O O
1A Reverse Direction O O O O
1B Baseblock 2 N.C. O O O O
1C Motor 2 Selection O O O O
 Loading...
Loading...




