1.3 Features ofΣ -Series Servos
13
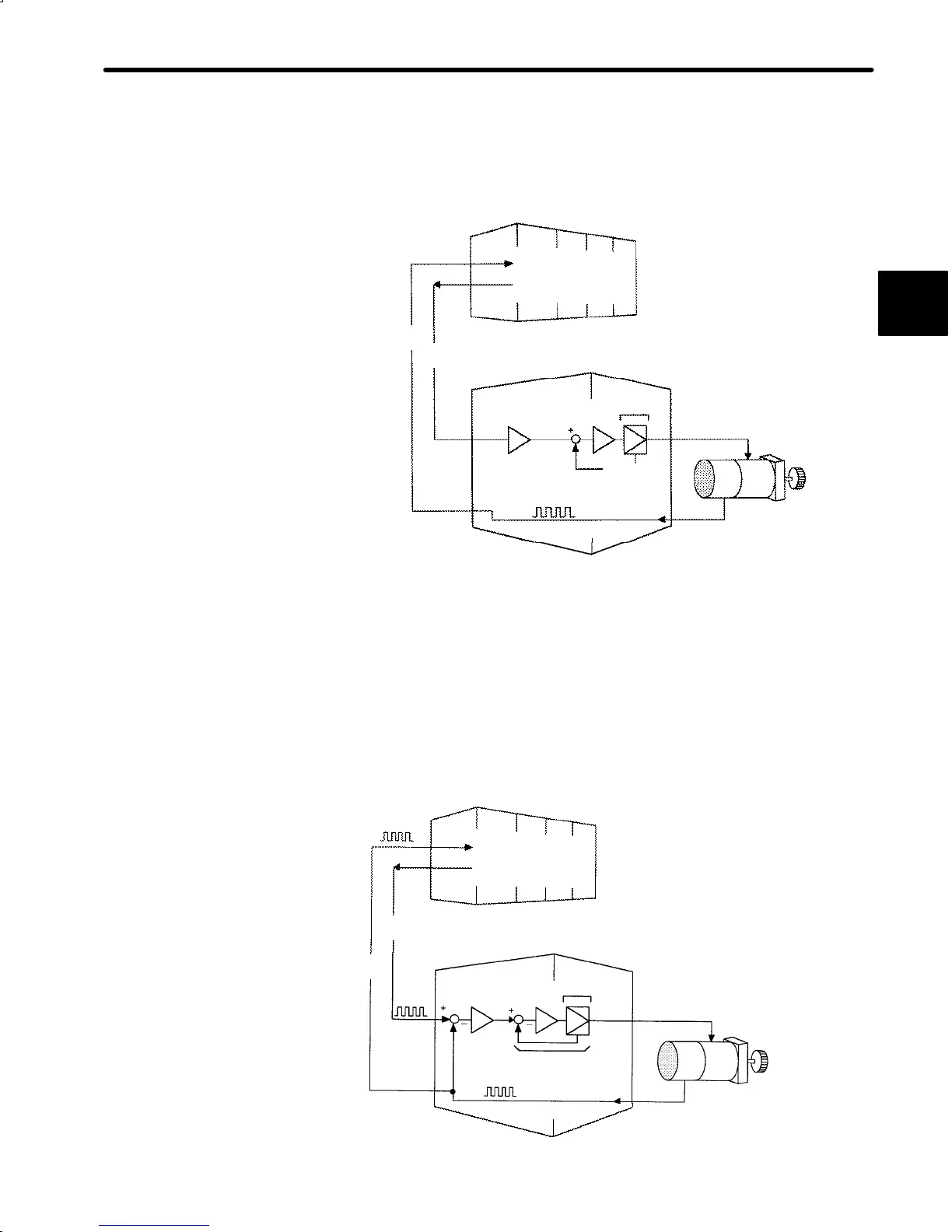
J Using SERVOPACK for Torque Control
SERVOPACK for torque control can be used as shown below:
Position
monitoring
Position
information
Host controller
SERVOPACK
(torque control mode)
Power
amplifier
(Analog
voltage)
Torque
(current)
feedback
Pulse train
Servomotor
Position feedback Encoder
Torque
reference
The host controller outputs a torque reference to control the SERVOPACK. It also re-
ceives a pulse train (position information) from the SERVOPACK and uses it to monitor
the position.
J Using SERVOPACK for Position Control
SERVOPACK for position control can be used as shown below:
Position
monitoring
Speed/current loop
Position
information
Host controller
Pulse train
Servomotor
Position feedback
Encoder
Pulse
train
Position
reference
Power
amplifier
SERVOPACK
(position control mode)
1
 Loading...
Loading...







