Individual Functions
6-111
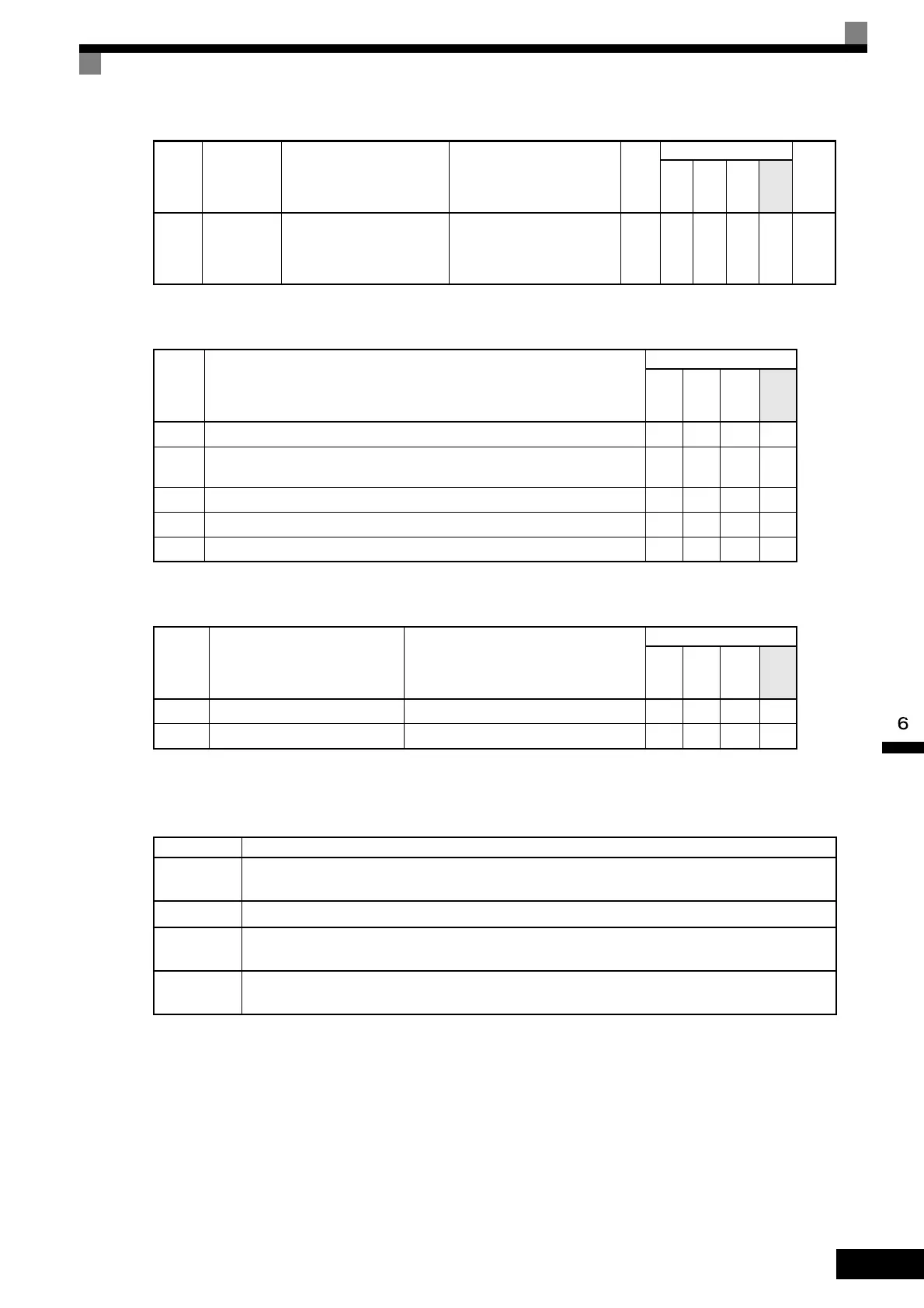
Multi-Function Contact Inputs (H1-01 to H1-06)
Multi-Function Analog Input (H3-05, H3-09)
PID Control Methods
There are four PID control methods. Select the method by setting constant b5-01.
U1-38
PID com-
mand
PID command + PID command
bias
Given as maximum frequency/
100%
10 V: Max. frequency
0.01
%
AAAA65H
Set-
ting
Value
Function
Control Methods
V/f
V/f
with
PG
Open
Loop
Vec-
tor
Flux
Vec-
tor
19 PID control disable (ON: PID control disabled) Yes Yes Yes Yes
30
PID control integral reset (reset when reset command is input or when stopped during
PID control)
Yes Yes Yes Ye s
31 PID control integral hold (ON: Hold) Yes Yes Yes Yes
34 PID soft starter ON/OFF Yes Yes Yes Yes
35 PID input characteristics switch Yes Yes Yes Yes
Set-
ting
Value
Function Contents (100%)
Control Methods
V/f
V/f
with
PG
Open
Loop
Vec-
tor
Flux
Vec-
tor
B PID feedback Maximum output frequency Yes Yes Yes Yes
C PID target value Maximum output frequency Yes Yes Yes Yes
Set Value Control Method
1
PID output becomes the Inverter output frequency, and D control is used in the difference between PID
target value and feedback value.
2 PID output becomes the Inverter output frequency, and D control is used in the PID feedback value.
3
PID output is added as compensation value of the Inverter output frequency, and D control is used in the
difference between PID target value and feedback value.
4
PID output is added as compensation value of the Inverter output frequency, and D control is used in the
PID feedback value.
Con-
stant
Number
Name Description
Output Signal Level Dur-
ing Multi-Function Analog
Output
Min.
Unit
Control Methods
MEMO
BUS
Regis-
ter
V/f
V/f
with
PG
Open
Loop
Vec-
tor
Flux
Vec-
tor

 Loading...
Loading...












