11 EN
Name Functional Description
Navigation
Module
By utilizing the principle of triangulation, which involves
emitting and receiving laser beams reected by surrounding
objects, precise distance measurement information
between the robot and nearby objects can be calculated
through algorithms� When the robot moves within a
certain environment, the positions of surrounding objects
are determined to create a spatial map of the robot's
surroundings� The measurement range is 0�8 m�
Obstacle
Avoidance
Module
With three sets of infrared transmitter and receiver pairs,
it operates on the principle of infrared reection to gauge
obstacle distances by signal strength� The maximum
detection range is approx� 10 cm�
Anti-drop
Sensor
With infrared distance measurement, the infrared sensor
can detect the distance between the bottom of ROBOT
and ground� ROBOT will not move forward when there are
stairs in front or the identied distance exceeds the preset
threshold, realizing the Anti-drop� The trigger distance is
approx� 60 mm�
Carpet
Detection
Sensor
The ultrasound probe can emit ultrasonic waves with a
frequency of 300KHZ� The energy of the ultrasonic waves is
absorbed by the carpet� If the reected energy is below the
threshold, the robot recognizes the presence of the carpet�
According to YEEDI lab tests, currently, over 50 types of
carpets available on the market can be identied�
Edge Sensor
With infrared distance measurement, ROBOT can detect the
distance between itself and objects on its right side� When
there is a wall or obstacle on the right side, ROBOT will
perform edge cleaning to avoid missing spots or collisions�
Anti-collision
Sensor
When the transmitted signal is blocked by an obstacle, the signal
receiver will not be able to receive the signal� With this principle,
the robot will avoid obstacles when colliding with them�
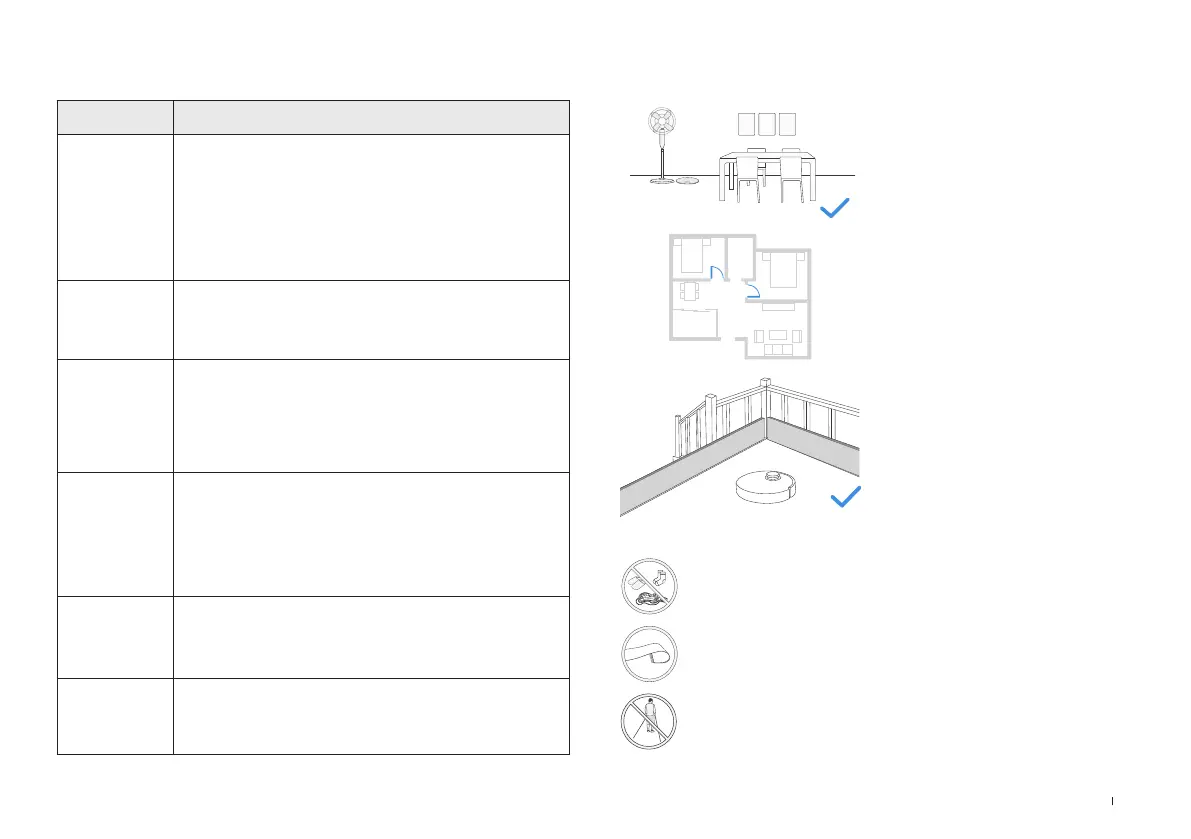
SENSORS NOTES BEFORE CLEANING
Put away objects including cables, cloths and slippers, etc� on the
oor to improve the cleaning efciency�
Before using the product on a rug with tasseled edges, please fold
the rug edges under�
Please do not stand in narrow spaces, such as hallways, and make
sure not to block sensors�
Tidy up the area to be cleaned by putting
furniture, such as chairs, in their proper
place�
During the rst use, make sure each room
door is open to help ROBOT fully explore
your house�
It may be necessary to place a physical
barrier at the edge of a drop to stop the unit
from falling over the edge�