30FR-CA
Nom Description fonctionnelle
Module de
navigation
En utilisant le principe de triangulation, qui implique l’émission et la
réception de faisceaux laser rééchis par les objets environnants,
des informations précises de mesure de distance entre le robot et
les objets avoisinants peuvent être calculées par des algorithmes�
Lorsque le robot se déplace dans un certain environnement, la
position des objets environnants est déterminée pour créer une
représentation spatiale de l’environnement du robot� La plage de
mesure est de 0,8 m�
Module
d'évitement
des obstacles
Avec trois paires d'émetteurs et de récepteurs infrarouges,
il fonctionne selon le principe de la réexion infrarouge pour
évaluer les distances des obstacles par la force du signal� La
portée maximale de détection est d'environ 10 cm�
Capteur
antichute
Avec la mesure de distance infrarouge, le capteur infrarouge
peut détecter la distance entre le bas du ROBOT et le sol�
Le ROBOT ne se déplacera pas vers l’avant lorsqu’il y a des
escaliers devant lui ou si la distance déterminée dépasse
le seuil préréglé, activant ainsi l’antichute� La distance de
déclenchement est d’environ 60 mm�
Capteur de
détection de
tapis
La sonde à ultrasons peut émettre des ondes ultrasoniques à
une fréquence de 300kHz� L’énergie des ondes ultrasoniques
est absorbée par le tapis� Si l’énergie rééchie est inférieure au
seuil, le robot reconnaît la présence d’un tapis� Selon les tests de
laboratoire YEEDI en cours, plus de 50types de tapis disponibles
sur le marché peuvent être identiés�
Capteur de
rebords
Avec la mesure de la distance infrarouge, le ROBOT peut
détecter la distance entre lui-même et les objets à sa droite�
Lorsqu’il y a un mur ou un obstacle à droite, le ROBOT
effectue un nettoyage des bords pour éviter les zones
manquantes ou les collisions�
Capteur
anticollision
Lorsque le signal transmis est bloqué par un obstacle, le
récepteur de signal ne peut pas recevoir le signal� En suivant
ce principe, le robot évitera les obstacles lorsqu’il entre en
collision avec eux�
CAPTEURS REMARQUES AVANT LE NETTOYAGE
Pour améliorer l’efcacité du nettoyage, rangez les objets, comme les
câbles, les vêtements, les pantoues et les autres articles du genre
qui se trouvent sur le plancher�
Avant d’utiliser l’appareil sur une carpette à franges, repliez les
franges sous la carpette�
Veuillez éviter de vous trouver dans les espaces étroits, comme les
passages, et assurez-vous de ne pas obstruer les capteurs�
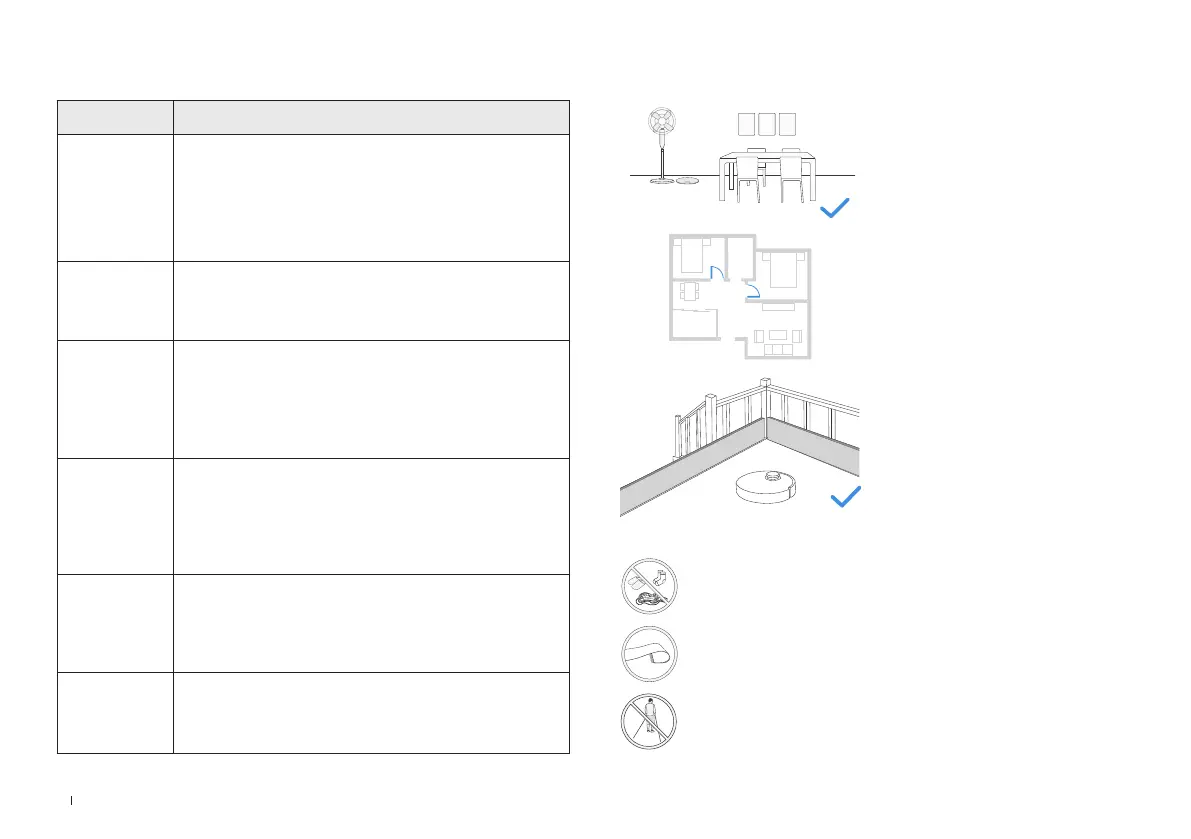
Rangez la zone à nettoyer en remettant
les meubles, comme les chaises, à leur
place�
Lors de la première utilisation, assurez-
vous que toutes les portes des pièces
sont ouvertes pour permettre à ROBOT
d’explorer entièrement votre maison�
Il pourrait être nécessaire de placer une
barrière physique au bord d’un point de
chute pour empêcher l’appareil de tomber�