49 ES-LA
Nombre Descripción funcional
Módulo de
navegación
Utilizando el principio de triangulación, que consiste en emitir
y recibir rayos láser reejados por los objetos circundantes,
se puede calcular mediante algoritmos información precisa de
medición de distancias entre el robot y los objetos cercanos�
Cuando el robot se desplaza en un entorno determinado, se
determinan las posiciones de los objetos circundantes para crear
un mapa espacial del entorno del robot� El rango de medición es
de 0�8 m�
Módulo de
Evitación de
Obstáculos
Con tres conjuntos de pares de transmisores y receptores de
infrarrojos, opera según el principio de la reexión infrarroja para
medir las distancias de los obstáculos por la intensidad de la
señal� El alcance máximo de detección es de aproximadamente
10 cm�
Sensor
anticaída
Con la medición infrarroja de distancia, el sensor infrarrojo
puede detectar la distancia entre la parte inferior del ROBOT
y el suelo� El ROBOT no se moverá hacia delante cuando
haya escaleras en frente o la distancia identicada exceda el
umbral preestablecido, lo que activará el sistema anticaídas� La
distancia de activación es de aproximadamente 60 mm�
Sensor de
detección de
alfombras
La sonda de ultrasonidos puede emitir ondas ultrasónicas con
una frecuencia de 300KHZ� La alfombra absorbe la energía de
las ondas ultrasónicas� Si la energía reejada es inferior al umbral,
el robot reconoce la presencia de la alfombra� Según las pruebas
de laboratorio de YEEDI, actualmente se pueden identicar más
de 50tipos de alfombras disponibles en el mercado�
Sensor de
borde
Con la medición infrarroja de distancia, el ROBOT puede detectar
la distancia entre sí mismo y los objetos situados a su derecha�
Cuando haya una pared o un obstáculo en el lado derecho, el
ROBOT realizará una limpieza de los bordes para evitar zonas
ignoradas o colisiones�
Sensores
antichoques
Cuando la señal transmitida queda bloqueada por un obstáculo, el
receptor de la señal no podrá recibirla� Con este principio, el robot
evitará obstáculos cuando choque con ellos�
SENSORES
OBSERVACIONES QUE SE DEBEN
TENER EN CUENTA ANTES DE
LIMPIAR
Quite los objetos que estén en el piso, incluidos cables, paños y
pantuas, etc�, para mejorar la eciencia de la limpieza�
Antes de utilizar el producto sobre una alfombra con bordes de
ecos, doble los bordes debajo de esta�
No se pare en espacios estrechos, como pasillos, y asegúrese de no
bloquear los sensores�
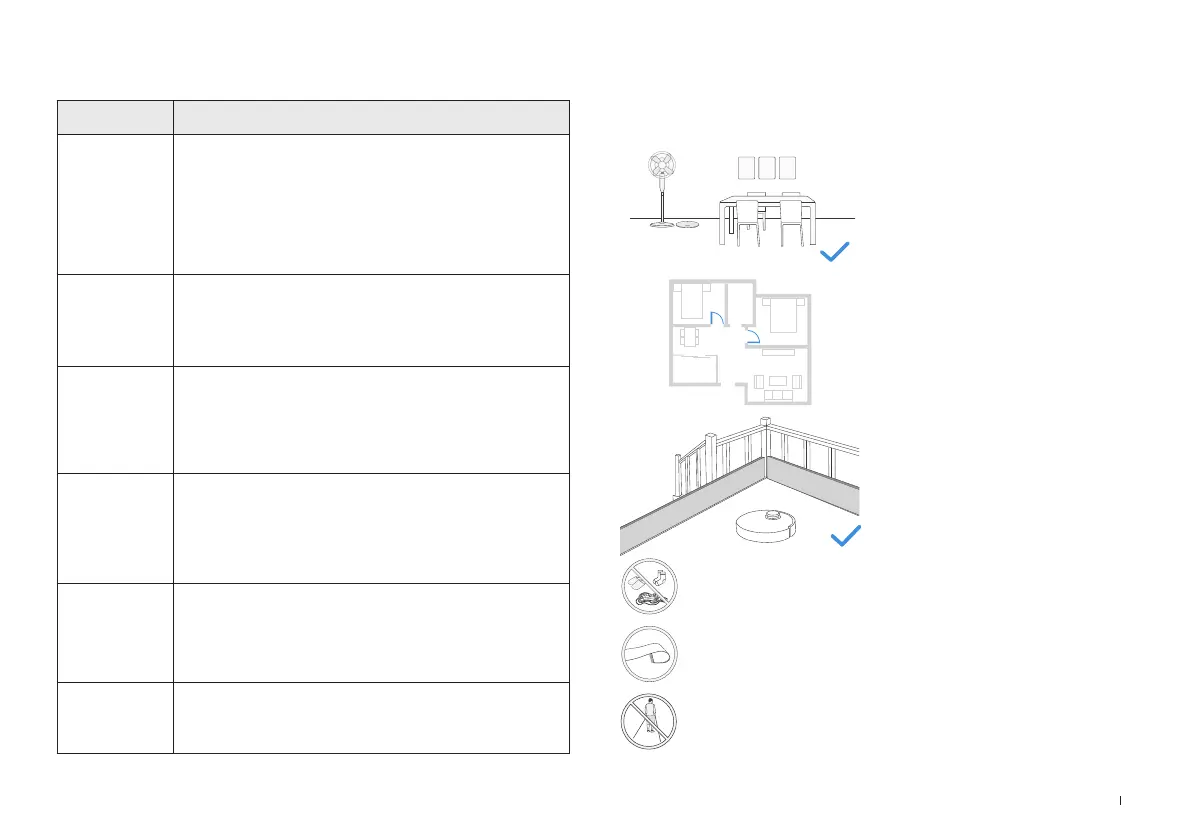
Despeje el área que se va a limpiar y
ubique muebles, tales como sillas, en su
lugar�
Durante el primer uso, asegúrese de
que cada puerta de la habitación esté
abierta para ayudar a ROBOT a explorar
completamente su casa�
Es posible que se deba poner una barrera
física en la orilla de algún desnivel para
impedir que la unidad se caiga�