6
Figure 1.5.1: Solo Onboard Sensors Table
*Links to data sheets for sensors listed in this table are location in Appendix 6.4.
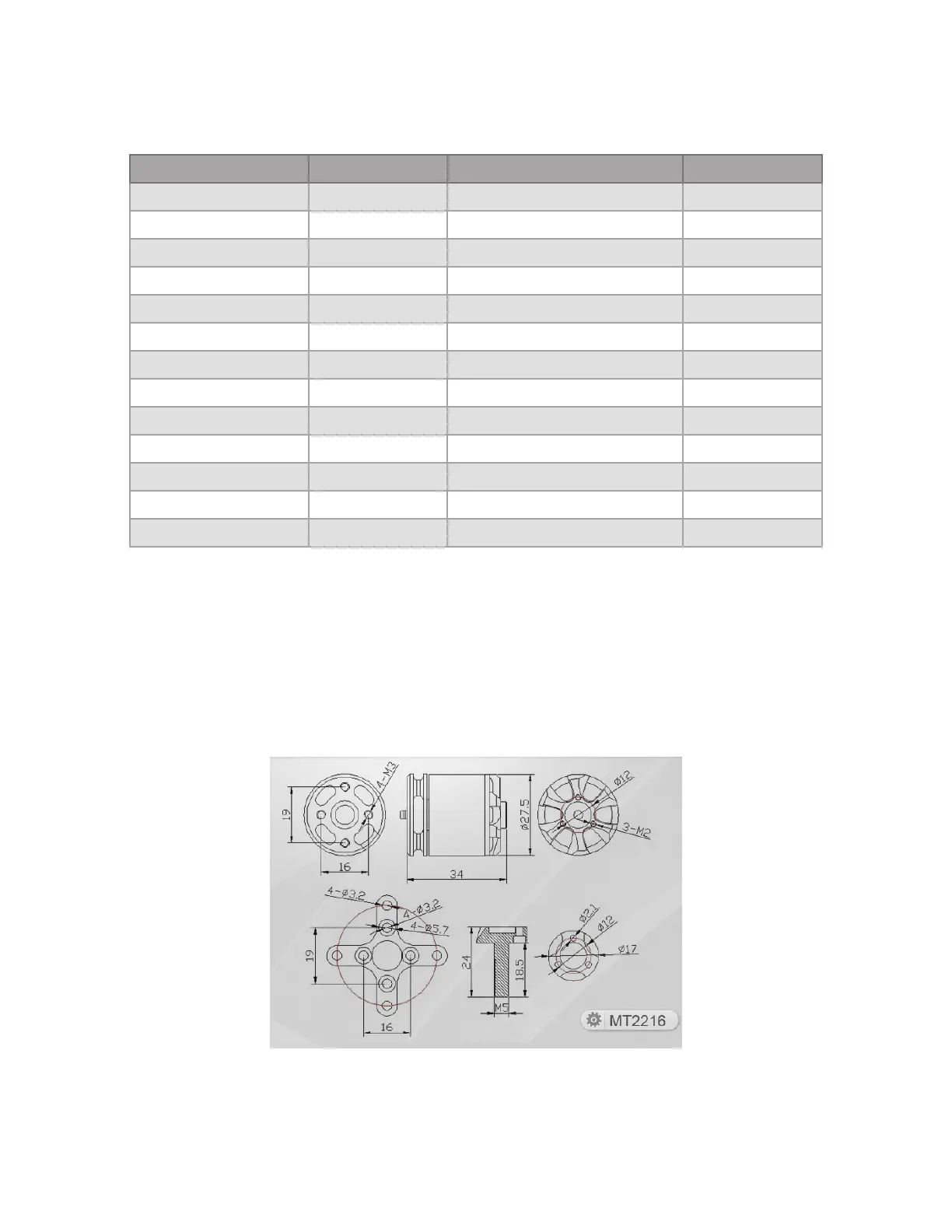
1.6 Propulsion
Solo uses four brushless, 880 K
V
motors and four propellers for propulsion. For control and aerodynamic efficiency,
two motors spin clockwise and two motors spin counterclockwise. Navigation in the air is achieved by mixing
propulsion of the four motors to actuate flight control along the roll, pitch, and yaw axes.
Figure 1.6.1: Motor Schematic Diagram
Location Sensor Manufacturer / Part Number* Data Type
Pixhawk 2 FMU Accelerometer InvenSense / MPU6000 Orientation
Pixhawk 2 FMU Gyroscope InvenSense / MPU6000 Motion
Pixhawk 2 FMU Magnetometer Honeywell / HMC 5983 Cardinal direction
Pixhawk 2 FMU Barometer Measurement Specialties / MS5611 Altitude
Pixhawk 2 Stabilized IMU Accelerometer InvenSense / MPU6000 Orientation
Pixhawk 2 Stabilized IMU Gyroscope InvenSense / MPU6000 Motion
Pixhawk 2 Stabilized IMU Barometer Measurement Specialties / MS5611 Altitude
Pixhawk 2 Stabilized IMU Accelerometer STMicroelectronics / LSM303D Orientation
Pixhawk 2 Stabilized IMU Magnetometer STMicroelectronics / LSM303D Cardinal direction
Pixhawk 2 Stabilized IMU Gyroscope STMicroelectronics / L3GD20 Motion
3DR Solo GPS GPS u-blox / NEO-7N Longitude & latitude
3DR Solo GPS GPS patch antenna Taoglas / GP.1575.25.4.A.02 Longitude & latitude
3DR Solo Compass Magnetometer Honeywell / HMC 5983 Cardinal direction
 Loading...
Loading...






