5
1.4 Operating Parameters
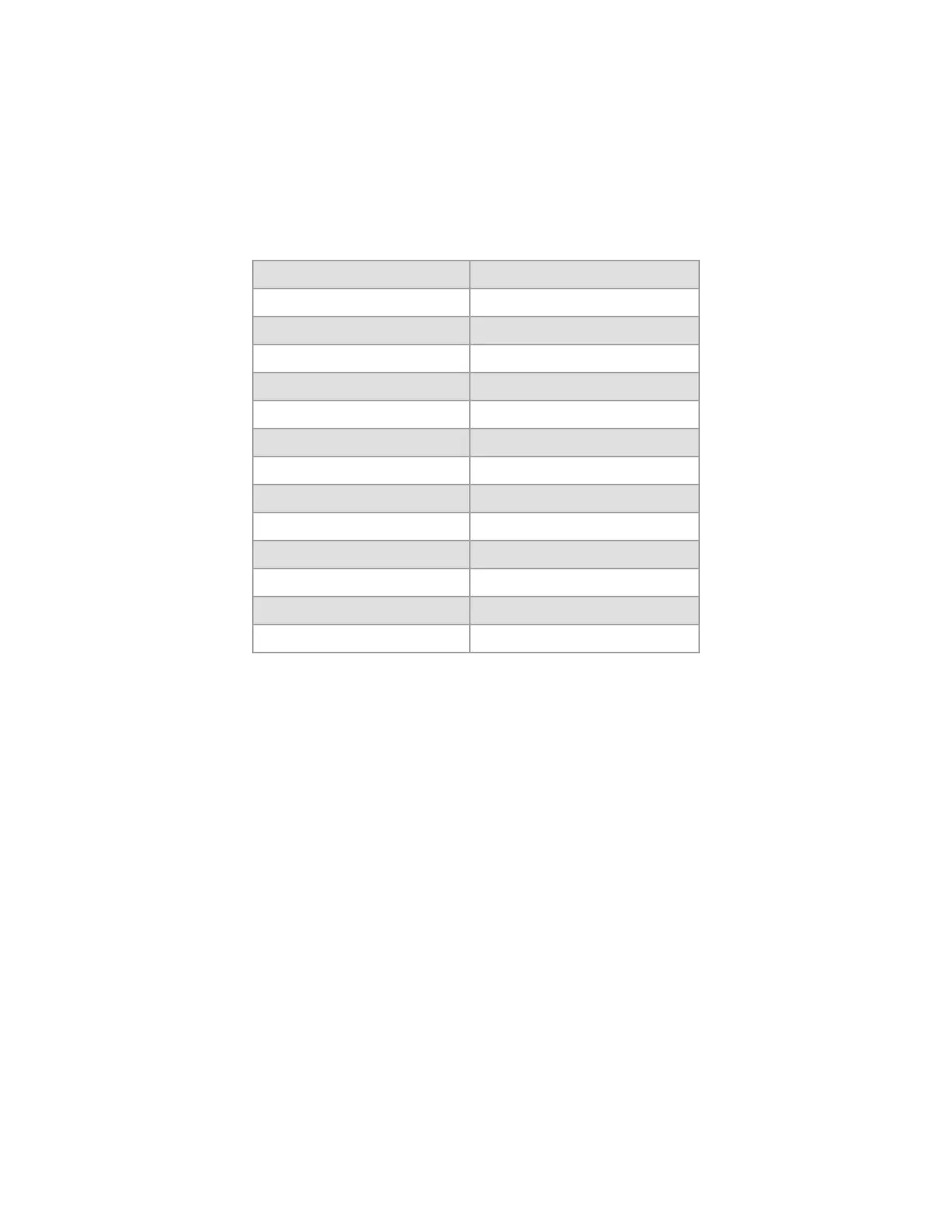
The operating parameters in Figure 1.4.1 apply to Solo. Always operate Solo within these parameters. Solo’s
performance and behaviors are not guaranteed when conditions violate the parameters listed below.
Figure 1.4.1: Solo Operating Parameters & Specifications Table
*Flight time varies with payload, wind conditions, elevation, temperature, humidity, flying style,
and pilot skill. Listed flight time applies to elevations less than 2,000 ft above sea level.
1.5 Autopilot
Solo uses a Pixhawk 2 autopilot running APM:Copter 3.3-dev software. APM:Copter is open-source flight control
based on the MAVlink communication protocol and part of the ArduPilot project. Pixhawk 2 runs an ARM Cortex-M4
STM32F427 processor with 2 MB of flash memory and 256 KB of RAM. Combined with an array of CAN, I2C, SPI,
PWM, and UART interfaces, Pixhawk 2 uses a suite of onboard sensors to calculate Solo’s orientation and motion in
flight. This data is input into APM:Copter’s inertial navigation and position estimation algorithms and combined with
control inputs to send commands to Solo’s propulsion system.
Communication frequency 2.4 GHz
Estimated flight time 25 minutes*
Maximum altitude 400 ft.
Range 2,000 ft. from launch point
Payload capacity 1.1 lbs.
Cruise speed 5 kts (2.5 m/s)
Maximum speed 55 mph (24.5 m/s)
Maximum climb rate 11 mph (4.9 m/s)
Maximum descent rate 6 mph (2.6 m/s)
Headwind limitation 17 mph (7.7 m/s)
Crosswind limitation 17 mph (7.7 m/s)
Operating temperature 32 F - 113 F
Operating relative humidity 0-85% RH
Max altitude above sea level 10,000 ft.