Chapter 6 – Parameters
6-26 ACH 500 Programming Manual
6 IR-COMP VOLTAGE
This parameter sets the compensation voltage level in Manual IR
Compensation. Keep the boost voltage as low as possible for the application,
as the motor will overheat rapidly or an overcurrent fault may occur if a high
level of compensation is applied.
Small motors can take higher compensation than larger motors because the
winding resistance is higher in small motors. If the motor must drive a load
with a high starting torque, use Torq Boost to start. If the load torque is high
below the set field weakening point, and you run continuously below the field
weakening point, use just enough IR-Compensation to drive the load. If you
have trouble with the motor overheating, use a lower speed motor, and run at a
higher frequency. Set in actual volts, step equals 1% of V
N
, 0.01 – 0.15 x V
N
,
voltage level at 0.1 Hz.
7 IR-COMP RANGE
This parameter defines the frequency at which the Manual IR Compensation
reduces to zero. The compensation voltage reduces linearly when the
frequency increases.
If Start-Up Data Parameter I (Motor Base Frequency) or Parameter 20.4.4
(Field Weak Point) is changed to a value lower than Parameter 20.4.7 (IR
Comp Range), that value will automatically be copied to Parameter 20.4.7
(IR-Comp Range).
8 SLIP COMPENSATION
A squirrel-cage motor will slip when loaded. The ACH 500 can compensate
for this slip by increasing the frequency as the current increases. With this
parameter ON, the slip will be reduced down to approximately 10 percent of
the original value.
You must set this function to OFF when using synchronous motors.
This parameter is automatically set to a value based on Start-Up Data
Parameters I (Motor Base Freq.) and J (Motor Base R.P.M.). You can adjust
the slip compensation after start-up.
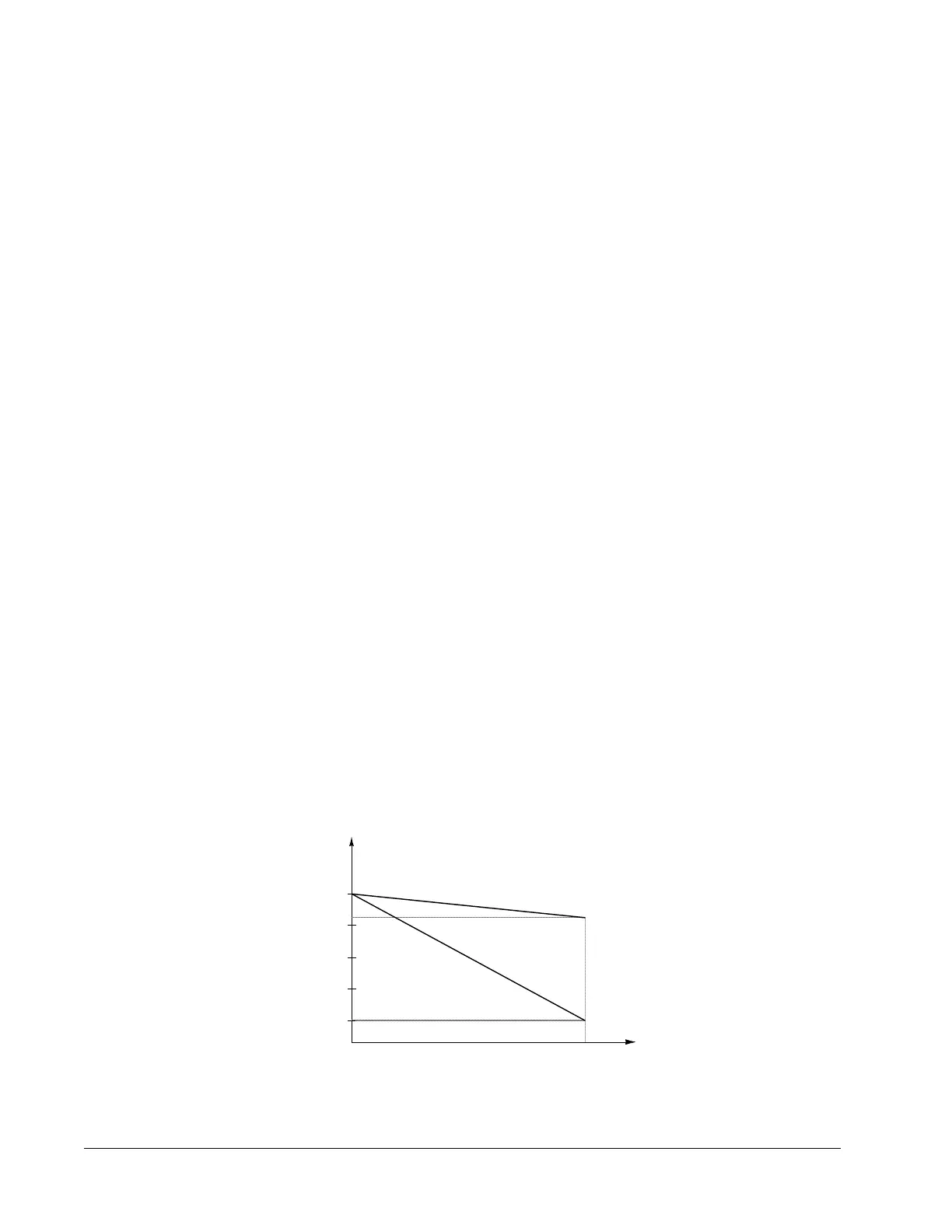
Figure 6-10 shows how slip compensation reduces slip in a 4-pole motor
under load.
Figure 6-10 Slip Reduction
Load
1800
[rpm]
Speed
960
Uncompensated Speed
Compensated Speed