Chapter 6 – Parameters
6-42 ACH 500 Programming Manual
If the parameter value is set to 3.0%, the PI-Controller operates as an
I-Controller.
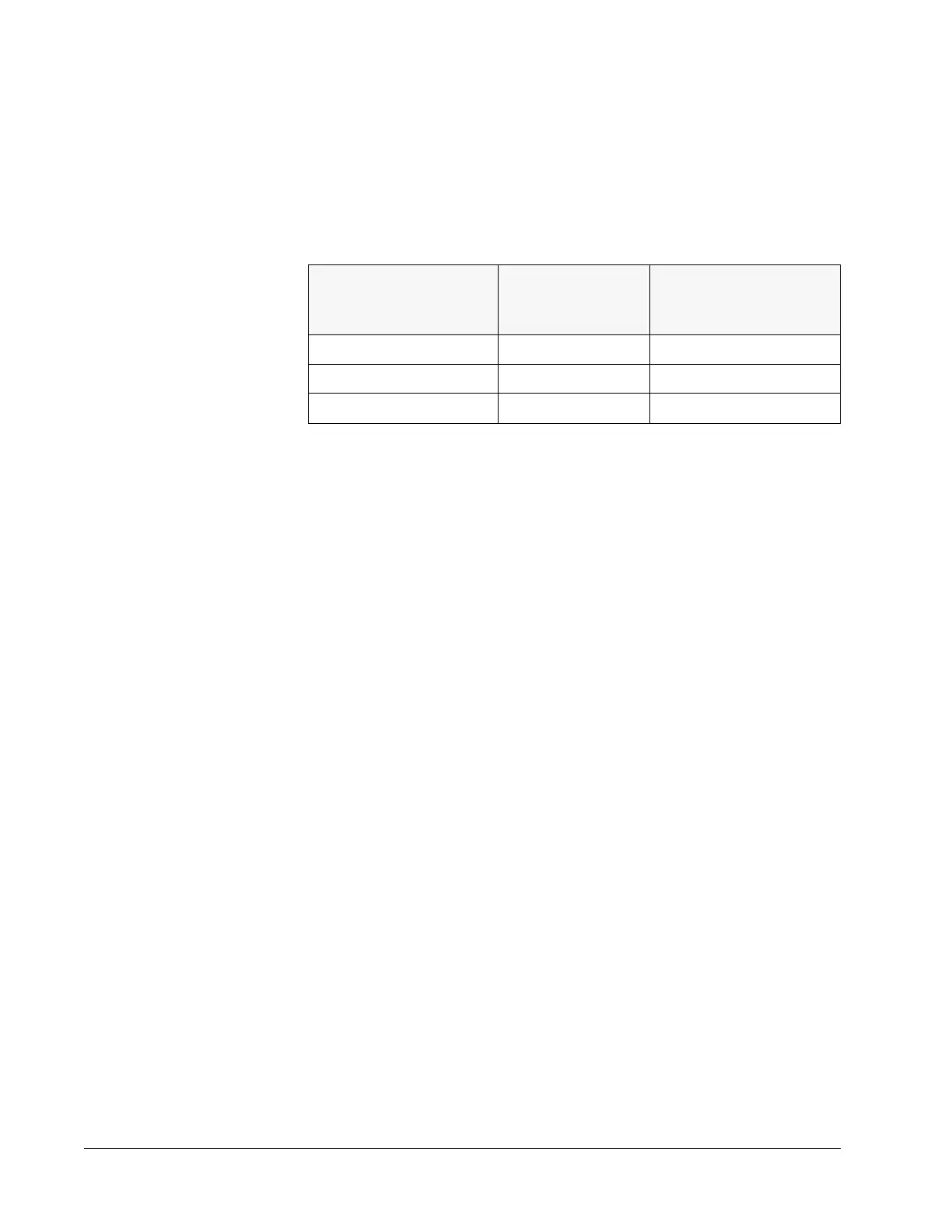
Table 6-22 lists a few examples of gain settings, and the resulting output
frequency change to a 10% change in error and a 50% change in error.
Table 6-22 Gain Settings
2 PI-CONT I-TIME
If the parameter value is set to 320.00s, the PI-Controller operates as a
P-Controller. Time range is 0.02s – 320.00s, 0.01s step.
3 PI-CONT MIN LIMIT
The minimum value of the PI-Controller frequency output. The limit cannot
be set less than 20.1.1 (Minimum Frequency). Range is 0 – 120 Hz, 0.01 Hz
step.
4 PI-CONT MAX LIMIT
The maximum value of the PI-Controller frequency output. The limit cannot
be set greater than 20.1.2 (Maximum Frequency). Range is 0 – 120 Hz, 0.01
Hz Step.
5 ERROR VALUE
INVERT
This parameter allows you to invert the Error Value (and thus the operation of
the PI-Controller). Normally, a decrease in Actual Signal (Feedback) causes
an increase in drive speed. If a decrease in Actual should cause a decrease in
speed, set Error Value Invert to YES.
6 ACTUAL VALUE
The Actual Value for the PI Controller can be a single signal, or two signals
combined by subtraction, addition or multiplication. The choices are as
follows.
ACT1
ACT1-ACT2
ACT1+ACT2
ACT1*ACT2
7 ACTUAL 1 INPUT
AI1 OR AI2
8 ACTUAL 2 INPUT
AI1 OR AI2
PI-Cont Gain
Output Frequency
Change for a 10%
Change in Error
Output Frequency Change
for a 50% Change in Error
50% 0.75 Hz 3.75 Hz
100% 1.5 Hz 7.5 Hz
300% 4.5 Hz 22.5 Hz