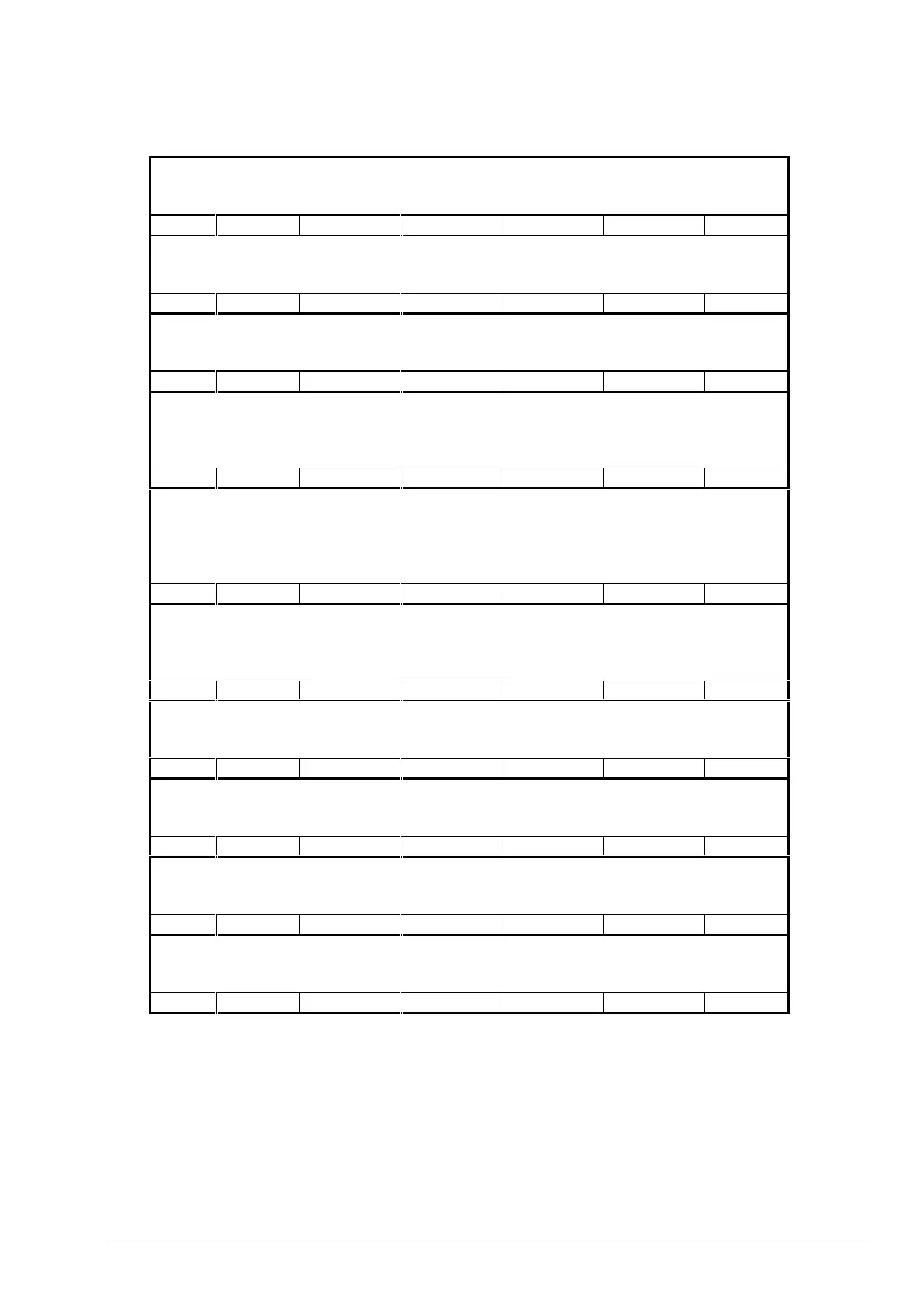
DCS500 Pin and Parameter list
A 53
SPC.[HOLD]
Input of SPEED_CONTROL-function block. ( S5/16 )
Command to keep present value of the integral part of speed controller.
2012 FB_I: C4 SC: BI HL: 19999 LL: 0 D: 0 U: -
SPC.DROOPING
Parameter of SPEED_CONTROL-function block. ( S5/16 )
A decrease in speed when the motor has a nominal load (T
N
).
2013 FB_P: I2 SC: 0.1 HL: 4000 LL: 0 D: 0 U: %
SPC.KP
Parameter of SPEED_CONTROL-function block. ( S5/16 )
The proportional gain of the speed controller. SPC.KP = 100 => gain = 1.
2014 FB_P: I2 SC: 1 HL: 32000 LL: 0 D: 500 U: %
SPC.KPSMIN
Parameter of SPEED_CONTROL-function block. ( S5/16 )
The proportional gain of the speed controller when output of the speed controller is 0.
Used to have lower gain when torque is small. SPC.KPSMIN = 100 => gain = 1
2015 FB_P: I2 SC: 1 HL: 32000 LL: 0 D: 0 U: %
SPC.KPSPOINT
Parameter of SPEED_CONTROL-function block. ( S5/16 )
Used to have lower gain when torque is small. The value of the speed controller output
where the gain is SPC.KP. Between controller output values 0...SPC.KPSPOINT the
proportional gain will increase from SPC.KPSMIN to SPC.KP.
2016 FB_P: I2 SC: TORQ HL: 16000 LL: 0 D: 0 U: %
SPC.KPSWEAKFILT
Parameter of SPEED_CONTROL-function block. ( S5/16 )
Used to have lower gain when torque is small.
The time constant of a filter that smoothens the changes of the proportional gain.
2017 FB_P: I2 SC: 1 HL: 10000 LL: 0 D: 500 U: ms
SPC.KI
Parameter of SPEED_CONTROL-function block. ( S5/16 )
Integral action time of the controller.
2018 FB_P: I2 SC: 1 HL: 32000 LL: 0 D: 5000 U: ms
SPC.TD
Parameter of SPEED_CONTROL-function block. ( S5/16 )
Time constant for the derivative part of the controller.
2019 FB_P: I2 SC: 1 HL: 32000 LL: 0 D: 0 U: ms
SPC.TF
Parameter of SPEED_CONTROL-function block. ( S5/16 )
The filter time constant for the derivative part of the controller.
2020 FB_P: I2 SC: 1 HL: 32000 LL: 5 D: 50 U: ms
ERR. [SPEED_ACT]
Input of SPEED_ERROR-function block. ( S5/16 )
Actuel speed value for speed error calculation.
2021 FB_I: C4 SC: SPEED HL: 19999 LL: 0 D: 12102 U: -