Functional Software description
44 DCS 500 Software Description
PI- Regulation The parameters of the PI controller can be set either with the
autotuning or manual tuning function. ARM CURR PI KP (407)
determines the gain of the regulator and ARM CURR PI KI (408)
determines the integral time constant of the regulator.
Scaling of the
gain KP
PI-controller input and output values are scaled so that gain value
100% produces in the output the same value as can be seen in the
input. This kind of scaling is used in the current controller of the
DCS500B.
output
R
CURR P
KP erro
=
*
256
So, default value 300 is equal to gain 300/256=1.17 (117%)
Scaling of the
Time Constant KI
Integral gain is calculated from the time constant:
ARM CURR PI KI
T
= 16384 *
where scantime = 3.33 ms in 50Hz network
= 2.77 ms in 60Hz network
TC = time constant in ms.
Discontinuous
Current Point
Parameter ARM CONT CUR LIM (409) is the converter actual cur-
rent at the point where discontinuous current of the armature circuit
changes to continuous current. By using autotuning this point will
be defined automatically. In manual tuning the point must be
measured from the armature circuit by means of e.g. an oscillo-
scope. Actual converter current value CONV CUR ACT (10501) is
set in parameter ARM CONT CUR LIM (409). There is also a
status bit B6 at TC_STATUS (11204), bit value 1 = armature cur-
rent is discontinuous.
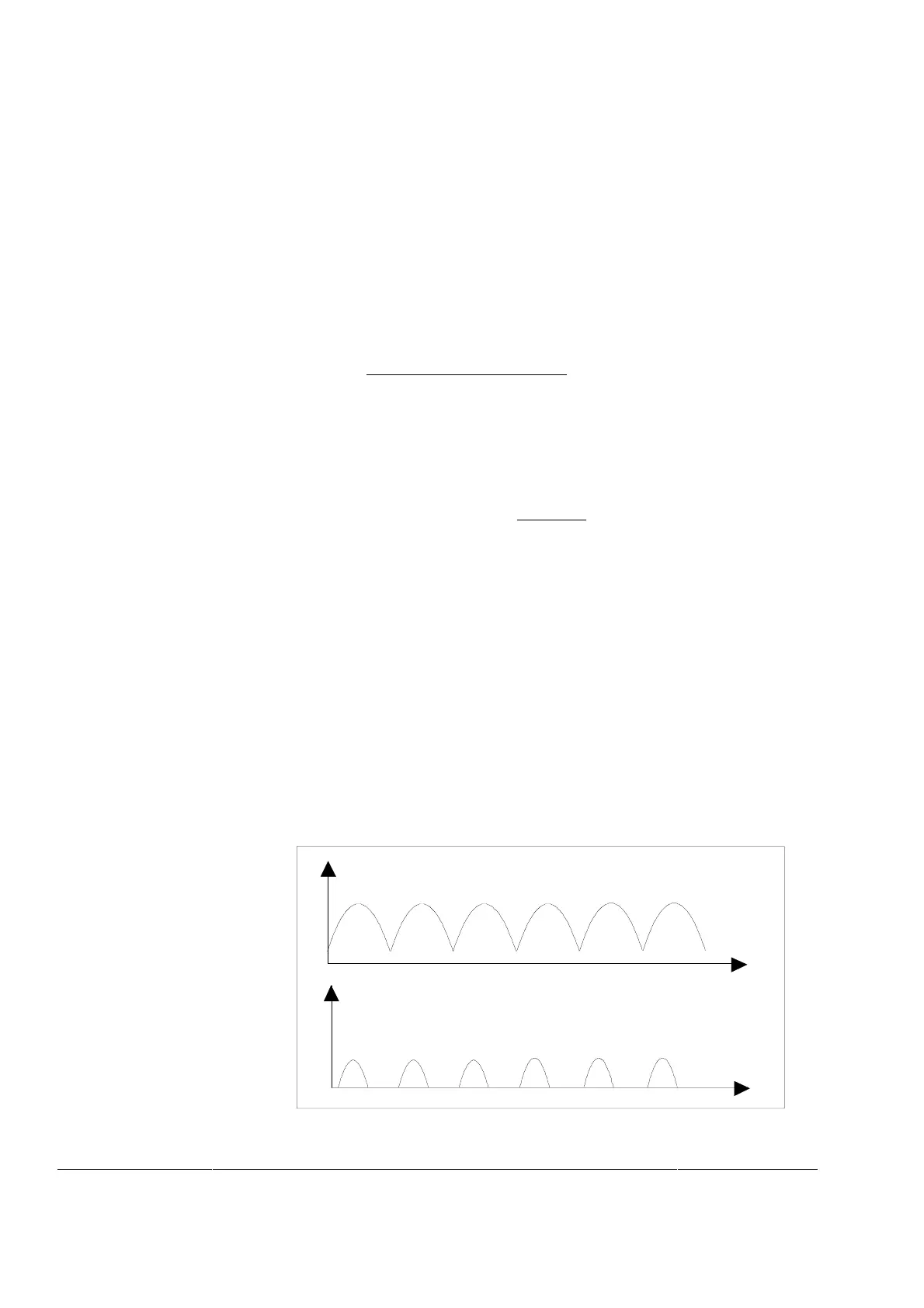
t
I
t
I
continuous armature current
discontinuous armature current
Figure 22 Waveforms of the armature current