21 2TLC172001M0211_A
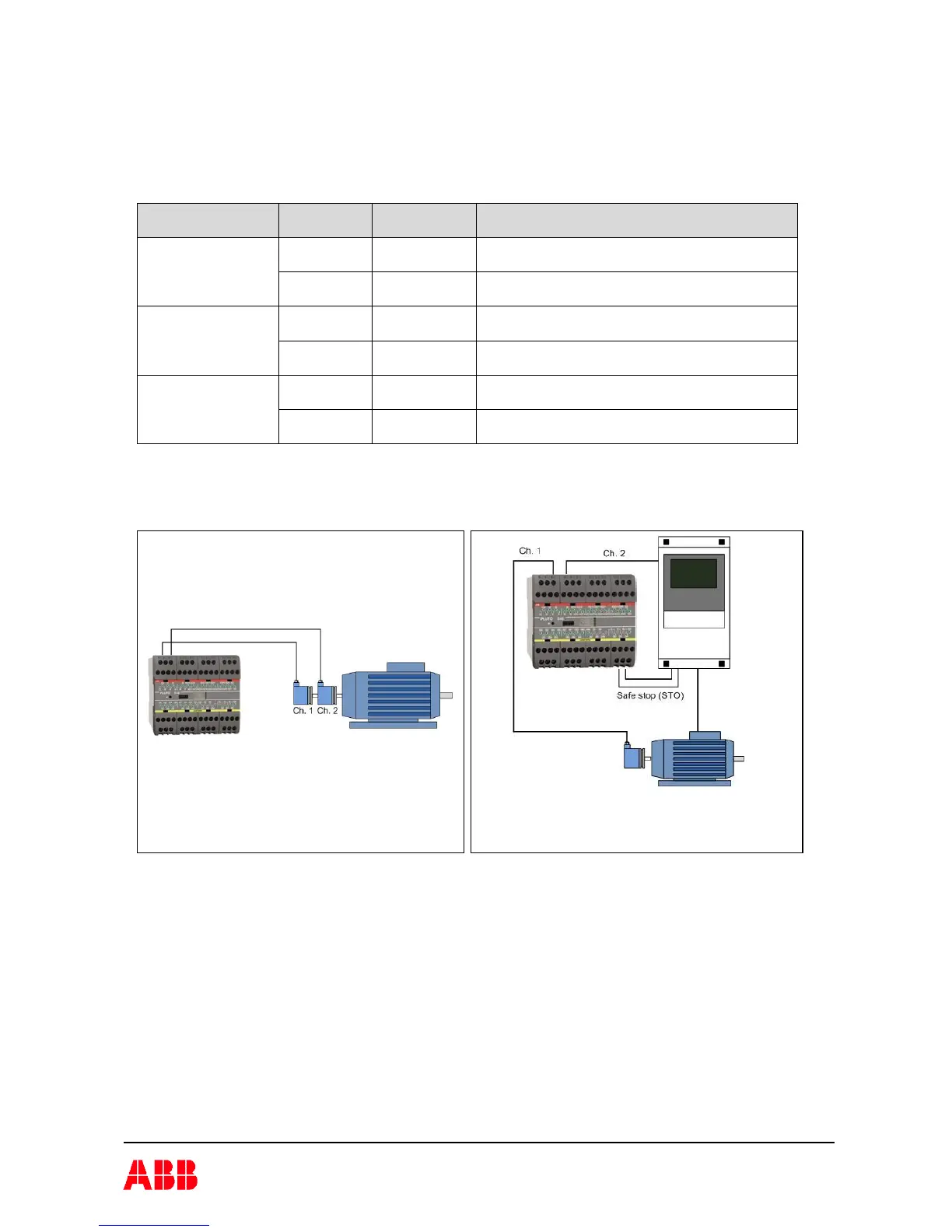
Example with two incremental encoders.
Example of two channel solution with one
encoder and a second channel from a
4.4.7 Possible architectures, achievable safety levels and prerequisites
This table is an overview of safety levels for different applications.
The achievable Cat / SIL / PL depends on the sensor which is used in the application and the
detection capability of faults listed in IEC 61800-5-2, table D.16.
realized in the application program
1 sensor/encoder Overspeed Cat 2 / PL c
SIL 1
Monitoring of dynamic behavior.
(E.g. Stand still is off at expected movement)
Stand still
monitoring
Cat 2 / PL c
SIL 1
Monitoring of dynamic behavior. Stand still
should not last in more than approx. 1 hour
2 sensors/encoders
homogeneous
redundant
Overspeed Cat 3 / PL d
SIL 3
Monitoring of dynamic behavior.
(E.g. Stand still is off at expected movement)
Stand still
monitoring
Cat 3 / PL d
SIL 2
Monitoring of dynamic behavior. Stand still
should not last in more than approx. 1 hour
2 sensors/encoders
diverse redundant
Overspeed Cat 4 / PL e
SIL 3
Monitoring of dynamic behavior.
(E.g. Stand still is off at expected movement)
Stand still
monitoring
Cat 3 / PL d
SIL 2
Monitoring of dynamic behavior. Stand still
should not last in more than approx. 1 hour
4.4.7.1 Application examples