Rockwell Automation Publication 2198-UM002G-EN-P - February 2019 433
Motor Control Feature Support Appendix E
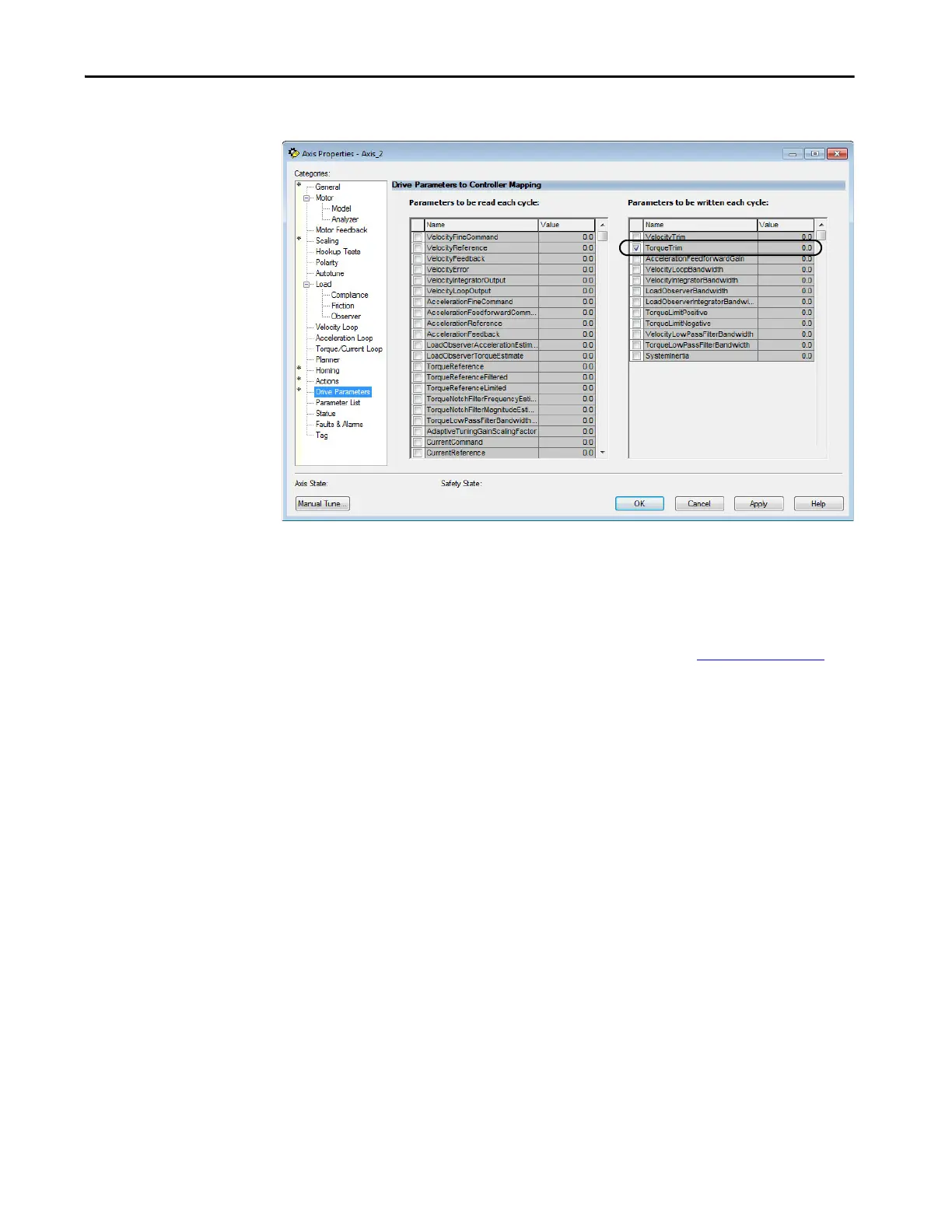
The Drive Parameters to Controller Mapping dialog box appears.
When using SLAT with the Kinetix 5700, the velocity command is sent to the
drive via an MAJ instruction (2198-xxxx-ERS3 series A drives, firmware 7.001
or earlier) or MDS instruction (2198-xxxx-ERS4 and 2198-xxxx-ERS3
series B drives, firmware 9.001 or later). The torque command is sent via the
cyclic write TorqueTrim attribute. See the Integrated Motion on the
EtherNet/IP Network Reference Manual, publication MOTION-RM003, for
more information on cyclic read and cyclic write.
For MAJ instruction (2198-xxxx-(series A) drives, drives, firmware 7.001 or
earlier):
• When using SLAT, start the axis with the MSO instruction.
• The VelocityCommand is sent via the MAJ instruction.
• The TorqueCommand is sent to AxisTag.TorqueTrim.
• To make changes to the VelocityCommand, you must re-trigger the
MAJ with the Speed value or use a MCD (motion change dynamics)
instruction.
• To stop the axis use a MAS instruction.
• The axis accelerates and decelerates at the MAJ instruction programmed
Acceleration and Deceleration rates.
• You can also change the rates using the MCD instruction.

 Loading...
Loading...







