Rockwell Automation Publication 2198-UM002G-EN-P - February 2019 123
Connector Data and Feature Descriptions Chapter 4
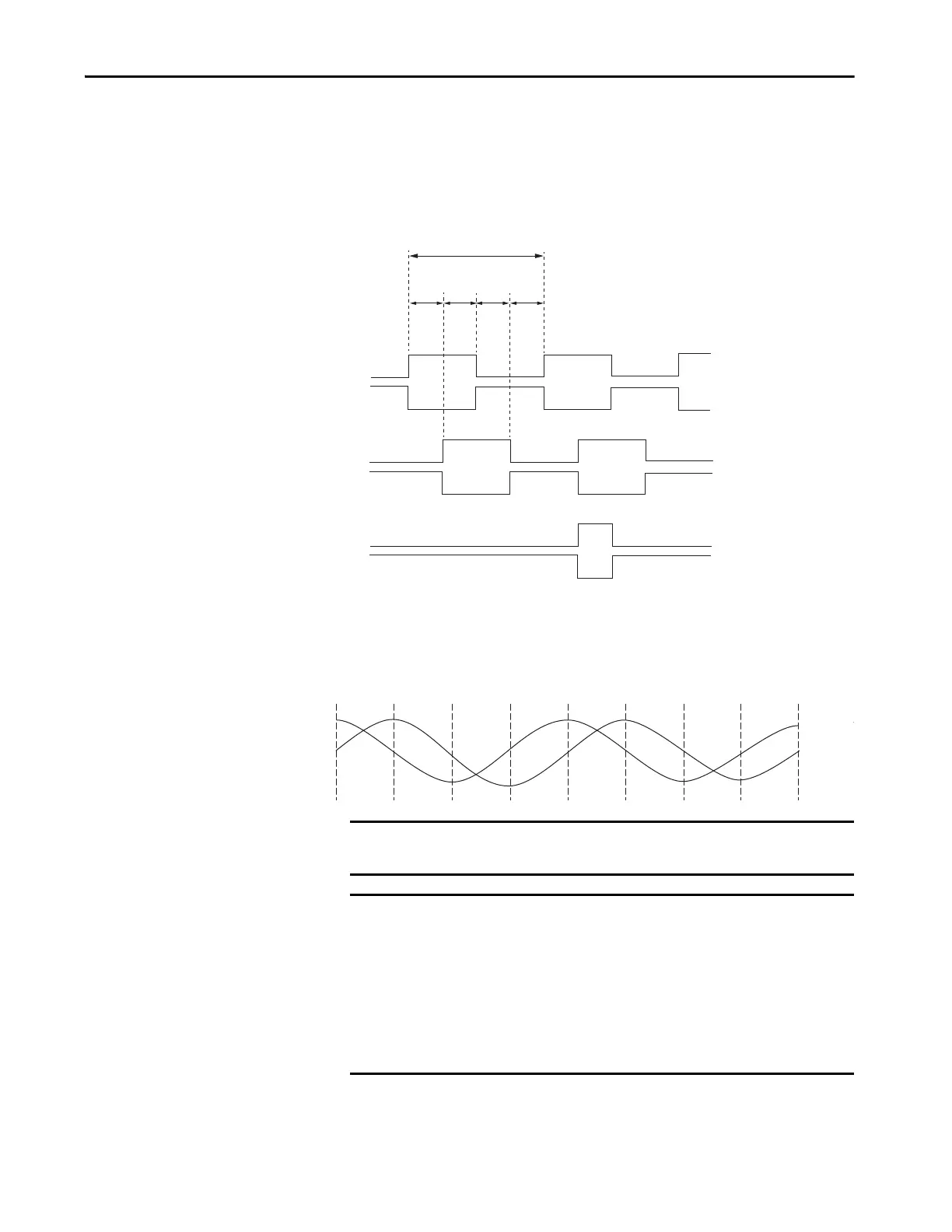
Encoder Phasing Definitions
For TTL encoders, the drive position increases when A leads B. Clockwise
motor rotation is assumed, when looking at the shaft.
Figure 76 - TTL Encoder Phasing
For Sin/Cos encoders (Stegmann Hiperface and Heidenhain EnDat), the drive
position increases when Cosine (B) leads Sine (A). Clockwise motor rotation is
assumed, when looking at the shaft.
Figure 77 - Sine/Cosine Encoder Phasing
A
/A
90°
90°
90° 90°
360°
B
/B
Z
/Z
IMPORTANT The Sine/Cosine encoder signal phasing is different than the TTL encoder
signal phasing.
IMPORTANT When using an incremental Sine/Cosine feedback device, the drive
cannot synthesize a marker signal, so a physical marker signal is required
for the home-to-marker sequence (and the marker hookup test) to
complete.
When using absolute feedback devices (for example, Stegmann
Hiperface) the drive synthesizes a marker signal because these devices
don't have a marker signal required for the home-to-marker sequence
(and the marker hookup test) to complete.
 Loading...
Loading...











