3-56 Programming and Parameters
INPUTS & OUTPUTS
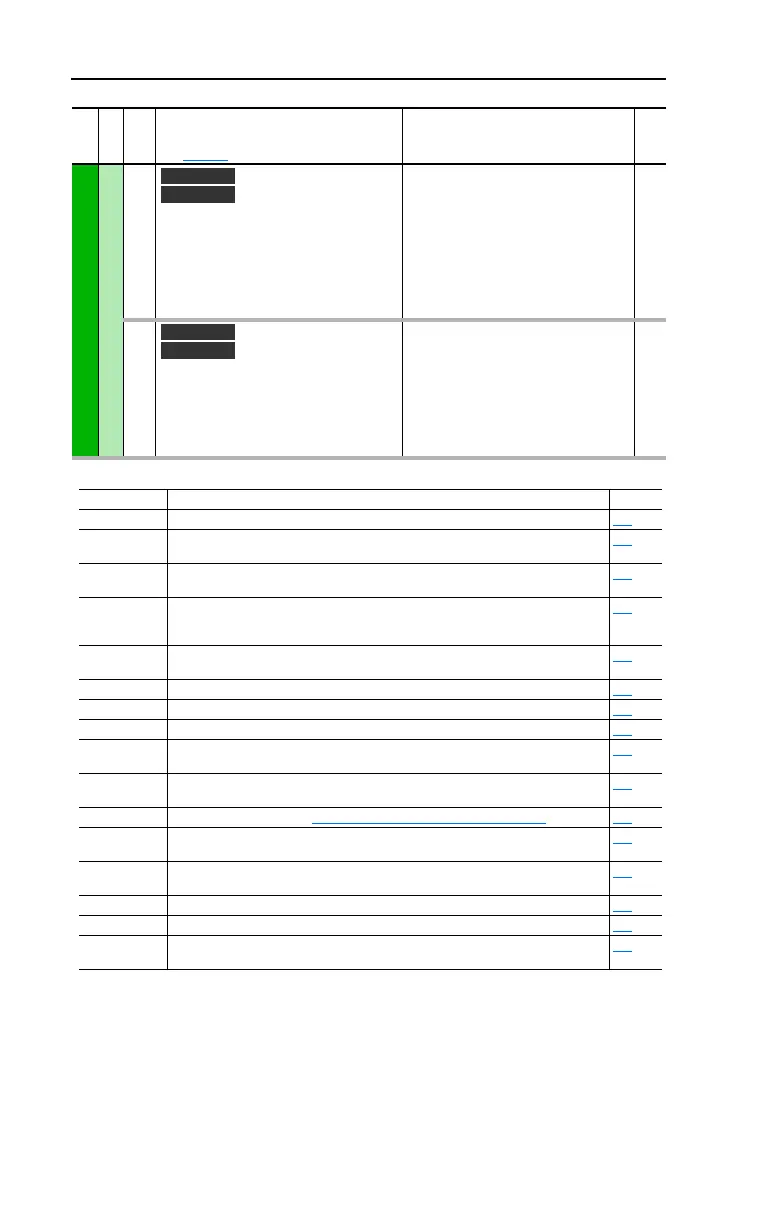
Analog Outputs
354
355
[Anlg Out1 Scale]
[Anlg Out2 Scale]
Sets the high value for the range of
analog out scale. Entering 0.0 will disable
this scale and max scale will be used.
Example: If [Analog Out Sel] =
“Commanded Trq,” a value of 150 =
150% scale in place of the default 800%.
Default:
Min/Max:
Units:
0.0
[Analog Out1 Sel]
0.01
377
378
[Anlg1 Out Setpt]
[Anlg2 Out Setpt]
Sets the analog output value from a
communication device. Example: Set
[Data In Ax] to “377” (value from
communication device). Then set [Analog
Outx Sel] to “Param Cntl.”
Default:
Min/Max:
Units:
20.000 mA, 10.000 Volts
0.000/20.000mA
–/+10.000V
0.001 mA
0.001 Volt
Selected Option Definitions – [Analog Outx Sel], [Digital Inx Sel], [Digital Outx Sel]
File
Group
No.
Parameter Name & Description
See page 3-2 for symbol descriptions
Values
Related
Vector v3
Vector v3
Vector v3
Vector v3
Option Description Related
At Speed Relay changes state when drive has reached commanded speed. 380
Fast Stop When closed, the drive will stop with a 0.1 second decel time. (If Torque Proving is
being used, float will be ignored at end of ramp and the mechanical brake will be set).
361
Excl Link Links digital input to a digital output if the output is set to “Input 1-6 Link.” This does not
need to be selected in the Vector option.
361
Input 1-6 Link When Digital Output 1 is set to one of these (i.e. Input 3 Link) in conjunction with
Digital Input 3 set to “Excl Link,” the Digital Input 3 state (on/off) is echoed in the Digital
Output 1.
380
Micro Pos Micropostion input. When closed, the command frequency is set to a percentage
speed reference as defined in [MicroPos Scale%], parameter 611.
361
MOP Dec Decrements speed reference as long as input is closed. 361
MOP Inc Increments speed reference as long as input is closed. 361
MtrTrqCurRef Torque producing current reference. 342
Param Cntl Parameter controlled analog output allows PLC to control analog outputs through data
links. Set in [AnlgX Out Setpt], parameters 377-378.
342
Param Cntl Parameter controlled digital output allows PLC to control digital outputs through data
links. Set in [Dig Out Setpt], parameter 379.
380
PI Reference Reference for PI block (see Process PI for Standard Control on page C-13). 342
Precharge En Forces drive into precharge state. Typically controlled by auxiliary contact on the
disconnect at the DC input to the drive.
361
Pulse In Ref Reference of the pulse input (Z channel of encoder - can be used while A & B
channels are encoder inputs).
342
Scale Block 1-4 Output of scale blocks, parameters 354-355. 342
Torque Est Calculated percentage of rated motor torque. 342
Torque Setpt 1 Selects “Torque Stpt1” for [Torque Ref A Sel] when set, otherwise uses value selected
in [Torque Ref A Sel].
361
 Loading...
Loading...












