Programming and Parameters 3-57
INPUTS & OUTPUTS
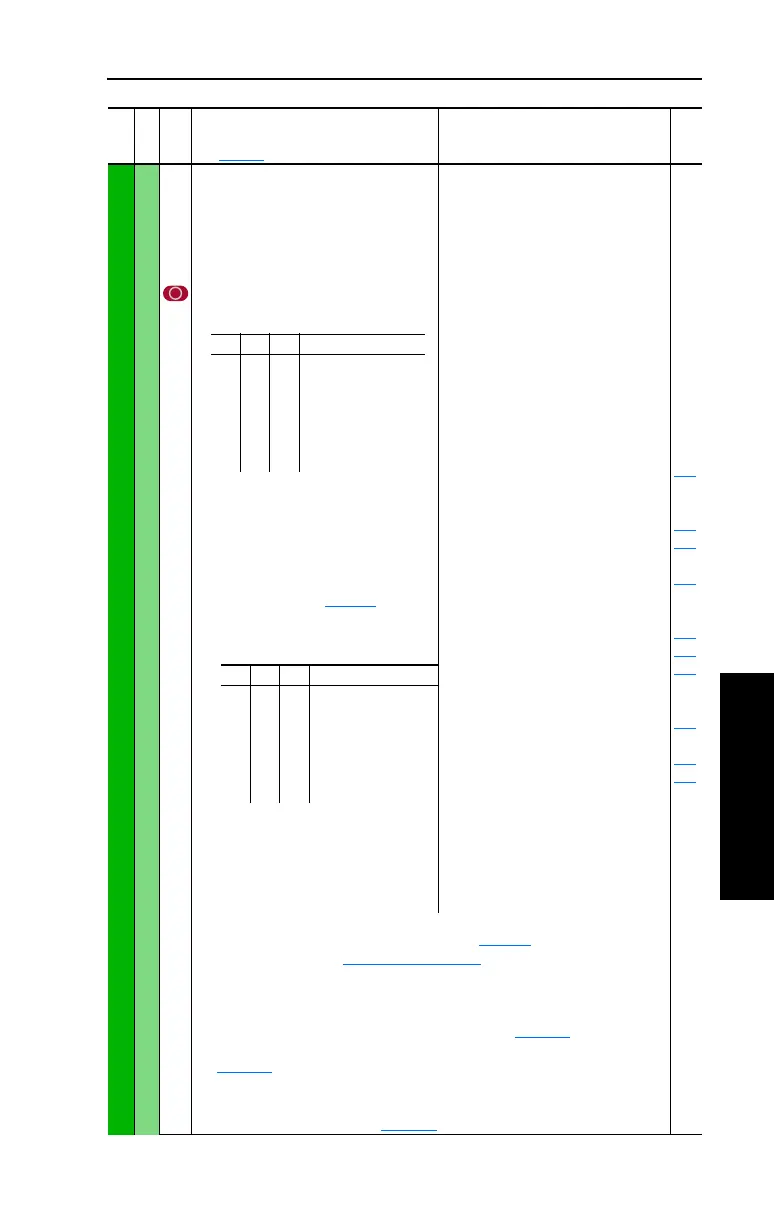
Digital Inputs
361
362
363
364
365
366
[Digital In1 Sel]
[Digital In2 Sel]
[Digital In3 Sel]
[Digital In4 Sel]
[Digital In5 Sel]
[Digital In6 Sel]
(11)
Selects the function for the digital inputs.
(1)
Speed Select Inputs.
To access Preset Speed 1, set [Speed
Ref x Sel] to “Preset Speed 1”.
Type 2 Alarms - Some digital input
programming may cause conflicts that
will result in a Type 2 alarm. Example:
[Digital In1 Sel] set to “5, Start” in 3-wire
control and [Digital In2 Sel] set to 7
“Run” in2-wire. See Table 4.C for info on
resolving this type of conflict.
(2)
Vector Control Option Only.
(4)
When [Digital Inx Sel] is set to option 2
“Clear Faults” the Stop button cannot be
used to clear a fault condition.
(5)
Typical 3-Wire Inputs - Only 3-wire
functions are allowed. Including 2-wire
selections will cause a type 2 alarm.
Default:
Default:
Default:
Default:
Default:
Default:
Options:
4
5
18
15
16
17
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15-17
18
19
20
21
22
23
24
25
26
27
28
29
30
31-33
34
35
36
37
38
“Stop – CF”
“Start”
“Auto/ Manual”
“Speed Sel 1”
“Speed Sel 2”
“Speed Sel 3”
“Not Used”
“Enable”
(8,10)
“Clear Faults”(CF)
(4)
“Aux Fault”
“Stop – CF”
(10)
“Start”
(5, 9)
“Fwd/ Reverse”
(5)
“Run”
(6, 10)
“Run Forward”
(6)
“Run Reverse”
(6)
“Jog”
(5)
“Jog1”
(2)
“Jog Forward”
(6)
“Jog Reverse”
(6)
“Stop Mode B”
“Bus Reg Md B”
“Speed Sel 1-3”
(1)
“Auto/ Manual”
(7)
“Local”
“Acc2 & Dec2”
“Accel 2”
“Decel 2”
“MOP Inc”
(14)
“MOP Dec”
(14)
“Excl Link”
(14)
“PI Enable”
“PI Hold”
“PI Reset”
“Pwr Loss Lvl”
“Precharge En”
(14)
“Spd/Trq Sel1-3”
(2,3)
“Jog 2”
(2)
“PI Invert”
(12)
“Torque Setpt 1”
(12,14)
“Micro Pos”
(12, 13, 14)
“Fast Stop”
(12, 14)
100
156
162
096
141
143
195
194
380
124
(6)
Typical 2-Wire Inputs - Requires that only 2-wire functions are chosen. Including
3-wire selections will cause a type 2 alarm. See Table 4.C for conflicts.
(7)
Auto/Manual - Refer to Figure 1.10 on page 1-22 for details.
(8)
Opening an “Enable” input will cause the motor to coast-to-stop, ignoring any
programmed Stop modes.
(9)
“Dig In ConflictB” alarm will occur if a “Start” input is programmed without a “Stop” input.
(10)
Refer to the Sleep-Wake Mode Attention statement on page 3-36.
(11)
A dedicated hardware enable input is available via a jumper selection. Refer to
page 1-19
for further information.
(12)
Vector firmware 3.001 and later.
(13)
Only available when “Torque Proving” function is selected.
(14)
Refer to Option Definitions on page 3-56.
File
Group
No.
Parameter Name & Description
See page 3-2 for symbol descriptions
Values
Related
321Auto Reference Source
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Reference A
Reference B
Preset Speed 2
Preset Speed 3
Preset Speed 4
Preset Speed 5
Preset Speed 6
Preset Speed 7
3
3 2 1 Spd/Trq Mode
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Zero Torque
Spd Reg
Torque Reg
Min Spd/Trq
Max Spd/Trq
Sum Spd/Trq
Absolute
Zero Trq

 Loading...
Loading...










