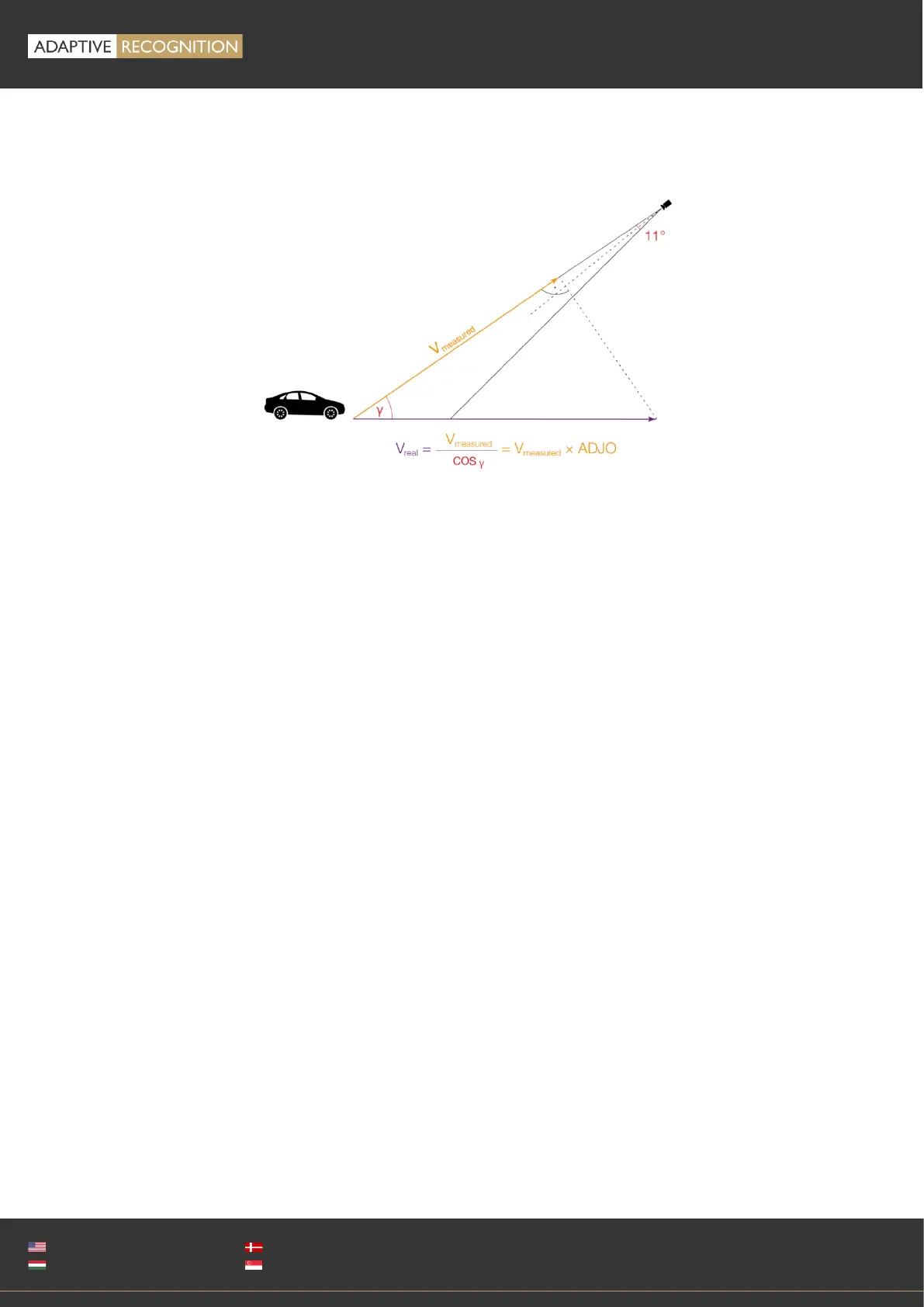
Angle correction and Cosine error: The device measures only the parallel (to the radar beam)
component of the speed. This is always less than or equal to the real speed of the vehicle.
However, the actual speed can be calculated if the pan and tilt angles of the device are known (see
images above). The measured speed can be corrected if the two parameters above (ADJO and
ADJL) are determined on the basis of the angles.
Calculation of the angle correction value: As the radar does not emit the beam pointwise but emits
an 11° × 11° angle (pyramid like) beam, the speeds of the arriving and leaving vehicles have to be
corrected separately with two different values. The ADJO (arriving) and ADJL (leaving) parameters
serve for this purpose.
In case of oncoming vehicles (ADJO): Vreal = Vmeasured / (cos (α - (δ/2)) * cos (β - (δ/2)))
In case of leaving vehicles (ADJL): Vreal = Vmeasured / (cos (α + (δ/2)) * cos (β + (δ/2))),
where:
V
real
the real speed of the vehicle
V
measured
the uncorrected speed measured by the radar
α the angle of the horizontal rotation (pan)
β the angle of the vertical rotation (tilt)
δ angle of the beam (11°)