Ascon Tecnologic - KX6 - ENGINEERING MANUAL - PAG. 12
]rEG group - Control parameters.
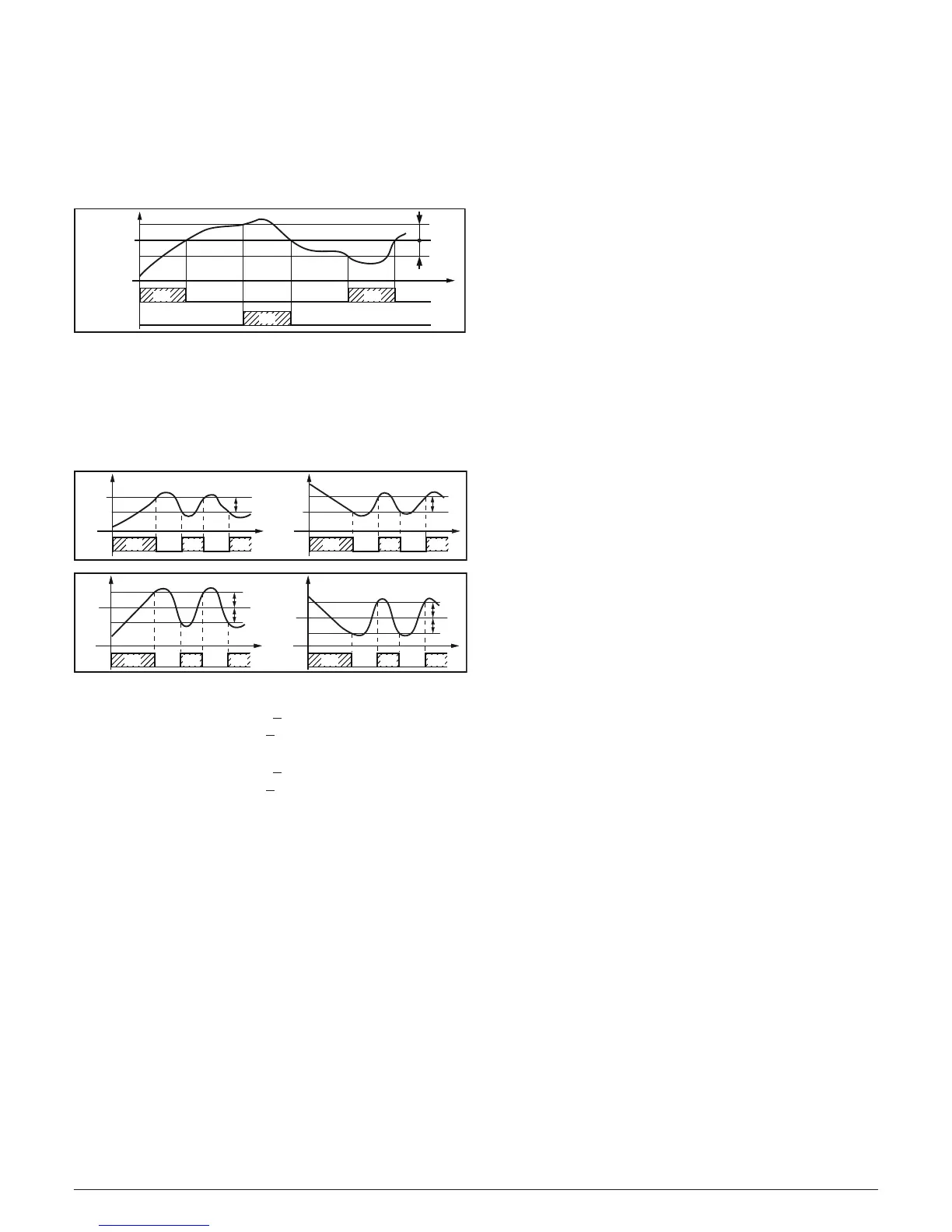
[39] cont - Control type:
Available: When at least one output is programmed as con-
trol output (H.rEG or C.rEG).
Range: • When two control actions (heat & cool) are pro-
grammed:
Pid PID (heat and cool);
nr
Heat/Cool ON/OFF control with neutral zone;
HSEt
HSEt
SP
PV
time
OUTH.rEG
(heating)
OUTc.rEG
(cooling)
offON ON
off off
ON
• When one control action (heat or cool) is pro-
grammed:
Pid PID (heat or cool);
On.FA ON/OFF asymmetric hysteresis;
On.FS ON/OFF symmetric hysteresis;
3Pt
Servomotor control (available when Out 1
and Out 2 have been ordered as “MM”).
HEAt - On.FA
OUT
H.rEG
SP
PV
HSEt
time
off off
CooL-On.FA
OUT
C.rEG
SP
PV
HSEt
time
ON ON ON
off off
ON ON ON
HEAt - On.FS
SP
PV
HSEt
HSEt
time
CooL -On.FS
SP
PV
HSEt
HSEt
time
OUT
H.rEG
off off
OUT
C.rEG
ON ON ON off offON ON ON
Notes: 1. ON/OFF control with asymmetric hysteresis:
• OFF when PV > SP;
• ON when PV < (SP - hysteresis).
2. ON/OFF control with symmetric hysteresis:
• OFF when PV > (SP + hysteresis);
• ON when PV < (SP - hysteresis).
[40] Auto - Auto tune selection
Ascon Tecnologic has developed three auto-tune algorithms:
– Oscillating auto-tune;
– Fast auto-tune;
– EvoTune.
1. The oscillating auto-tune is the usual auto-tune and:
• It is more accurate;
• Can start even if PV is close to the set point;
• Can be used even if the set point is close to the
ambient temperature.
2. The fast type is suitable when:
• The process is very slow and you want to be opera-
tive in a short time;
• When an overshoot is not acceptable;
• In multi-loop machinery where the fast method reduces
the calculation error due to the effect of the other loops.
3. The EvoTune type is suitable when:
• You have no information about your process;
• You can not be sure about the end user skills;
• You desire an auto tune calculation independently
from the starting conditions (e.g. set point change
during tune execution, etc).
Note: Fast auto-tune can start only when the measured
value (PV) is lower than (SP + 1/2 SP).
Available: When [39] cont = PID or 3Pt.
Range: -4... 8 where:
-4 Oscillating auto-tune with automatic restart at
all set point change;
-3 Oscillating auto-tune with manual start;
-2 Oscillating auto-tune with automatic start at the
first power up only;
-1 Oscillating auto-tune with automatic restart at
every power up;
0 Not used;
1 Fast auto tuning with automatic restart at every
power up;
2 Fast auto-tune with automatic start at the first
power up only;
3 FAST auto-tune with manual start;
4 FAST auto-tune with automatic restart at all set
point change.
5
EvoTune with automatic restart at every power up;
6 EvoTune with automatic start at the first power
up only;
7 EvoTune with manual start;
8 EvoTune with automatic restart at all set point
change.
[41] tunE - Manual start of the auto-tune
Available: When [39] cont = PID or 3Pt.
Range: oFF
The instrument is not performing the auto-tune;
on The instrument is performing the auto-tune.
[42] HSEt - Hysteresis of the ON/OFF control
Available: When [39] cont is different from PID or 3Pt.
Range: 0... 9999 engineering units.
[43] Pb - Proportional band
Available: When [39] cont = PID or 3Pt.
Range: 1... 9999 engineering units.
Note: Auto-tune functions calculate this value.
[44] ti - Integral time
Available: When [39] cont = PID or 3Pt.
Range: OFF = Integral action excluded;
1... 9999 seconds;
inF= Integral action excluded (reserved).
Note: Auto-tune functions calculate this value.
[45] td - Derivative time
Available: When [39] cont = PID or 3Pt.
Range: oFF - derivative action excluded;
1... 9999 seconds.
Note: Auto-tune functions calculate this value.
[46] Fuoc - Fuzzy overshoot control
This parameter reduces the overshoot usually present at
instrument start up or after a set point change and it will be
active only in this two cases.
Setting a value between 0.00 and 1.00 it is possible to slow
down the instrument action during set point approach.
Setting Fuoc = 1 this function is disabled.