5/46
2. User guide introduction
This chapter presents a brief introduction on the general operation of the Asycube and an
overview of the procedure for setting up the Asycube for your application, followed by a
definition of the expressions used throughout this and other Asyril documentation. The
following chapters detail how to use the Asycube and at the end, to conclude this document,
a step-by-step example is given.
The Asycube is a flexible feeder system, which spreads the parts on the picking surface
using smart vibrations. Displacements in all directions as well as more advanced trajectories
are the result of the sum of the excitations of the different actuators. The role of the Asycube
is to:
• Distribute and flip the components over the picking surface
• Manage the feeding from the hopper in order to have enough components on the
picking surface
2.1. General operation
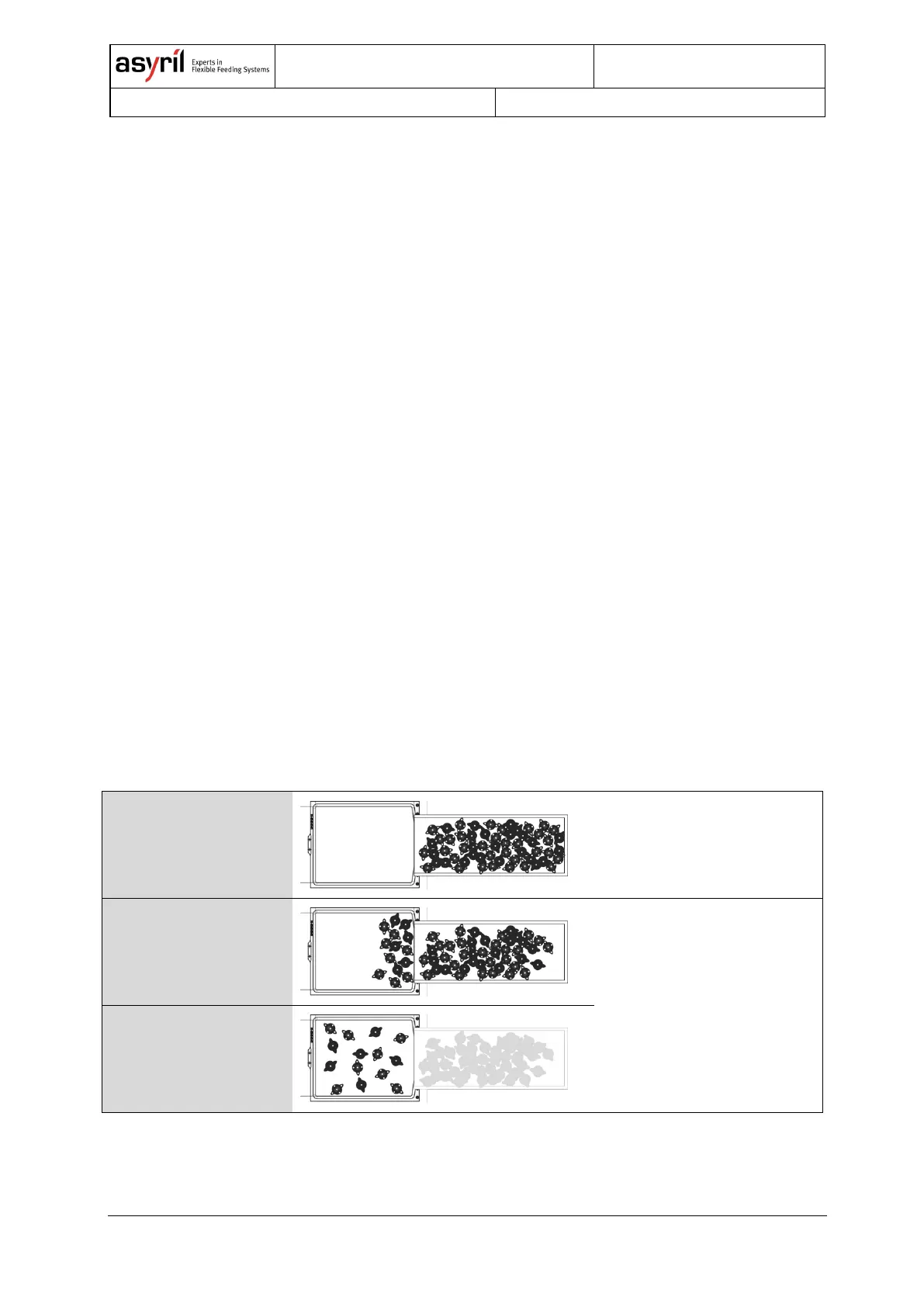
The table below shows the general procedure for using the Asycube with interaction of a
vision system and a robot, starting from an initial empty platform.
#AllParts = number of parts detected on the picking surface
Threshold = upper limit of parts on the platform for feeding vibration
GoodParts = parts well oriented and ready to be picked by a robot

 Loading...
Loading...